

























INSTRUCTION MANUAL CENTRAL COMMAND STATION MX10, MX10EC Page33
Menu point MX10 Config
GREY
Scroll with the rotary knob to the desired menu point,
the cursor (
) marks the current position.
Press rotary knob
, the value is marked, or or the
selected submenu is opened.
the value or option is adjusted with the rotary knob.
Press rotary knob again
fix and save. The rotary
knob now again is used to scroll.
Button
3
(
)
back to the MX10 menu
- If the
language
is changed here, it switches immediately. All texts that are not available in the select-
ed language are replaced by the German texts.
- The
radio channel
can be looked up in MX32 PULT CONF. This radio channel can be adjusted in
the MX10 to prevent radio collisions with other devices.
- “
Start-up
” defines, if after starting-up the system all trains (decoders) and/or turnouts (accessory de-
coders) are set to the state they were before the system was turned off. Configurations can be: a) a
complete “restore” (this is the default configuration), b) automatically turning on the functions, c) au-
tomatic run-up to the previously set speeds, d) only the last state of the accessory decoders or e) all
decoder data is deleted. Also, the activation/deactivation of the MAN bit is configured here.
-
Booster Error
: Configuration of the operating state after an overcurrent notification of the connected
booster or by activating the emergency stop button via the “Boo UE” input of the booster socket
(MX10 back ZIMO CAN). Options: “BCS S1”, “BCS S2”; “BCS S1+S2”; “OFF S1”; “OFF S2”; “OFF
S1+ S2” or “Message”.
-
Rotary knob long:
Function of the rotary knob when pressed for 4 seconds. Options: Ignore, System
Standby (Default) or track OFF.
- “
Sync
” defines, if track 1 and track 2 work independently (default, different running voltages, BCS
possible, etc.) or completely identical regarding state, voltage and command, so a parallel use (for
one circuit of up to 20A) is possible.
- Select, if the device shall be
Master
or
Booster
.
-
Sniffer Input
: prepared.
- “
Analog address”
i.e. virtual address (can be called up from the controllers) for
analog vehicles, which are controlled corresponding to NMRA with the “stretched 0-Bit method”.
- “
MX10 Sound
”, virtual address for the sound generator (including built-in speaker and audio sock-
et), via which it can be called-up at the controller to play back some of the stored sound samples via
function keys.
- Virtual
address for MX10 OSE
Calls up operation sequences after the address was activated on
the controller.
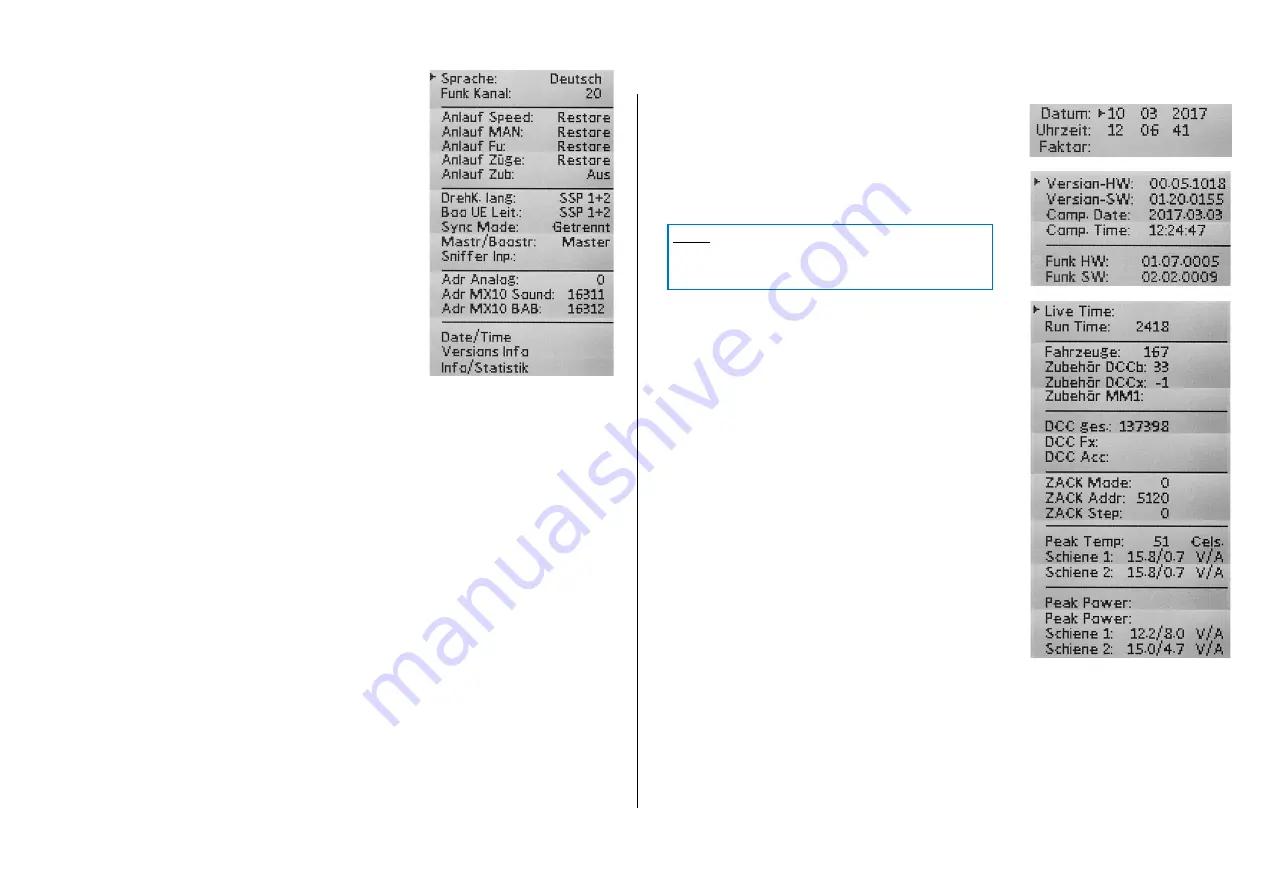
-
Date/Time
: In this submenu of “MX10 Config”, time and date
can be changed, as well as the model railway factor can be
adjusted
with the rotary knob as described on the left. The
data changed on the MX10 is also stored in the MX32 as
soon as the system is restarted.
-
Version Info
: This screen contains information about the
software currently on the device and its creation date. Here
you also find the current software of the radio processor.
-
Info/Statistics
: This data is only for information purposes
and cannot be changed in this screen.
“Live Time” is the absolute on-time of the MX10, while “Run
Time” shows the time since the last start-up of the system.
The vehicles and accessory decoders stored in the MX10 are
shown in DCCb, DCCx and MM1 format.
DCC all: total of all sent DCC packets within the “Run Time”.
It is divided into DCC speed (speed commands), DCC Fx
(function commands) and DCC Acc (accessory commands).
The ZACK-registration can be turned ON or OFF in “DCC
signal setting” and is set to the state SCAN if an address of a
new vehicle on the tracks is determined. After scanning, the
ZACK address is shown. ZACK step shows how many calcu-
lation processes had to be done to determine the address.
“Peak temp” shows the highest measured temperature in
Celsius at the voltage and current values shown beneath.
“Peak power” shows the highest voltage and current on each
track.
NOTE: The radio processor software of the MX10 should
match the one in the MX32 (“Pult Conf” - “HW/SW Version
Info”) Otherwise, the radio connection will be bad or not
work at all.







































































