





























VPLCE532E Vision Motion Controller User Manual V1.5
⚫
When there are multiple slave stations, p
lease connect a 120Ω terminal resistor in
parallel to each end of the CAN bus for matching the circuit impedance.
⚫
Please connect a 120Ω terminal resistor in parallel
to each end of the CAN bus for
matching the circuit impedance and ensuring communication stability.
⚫
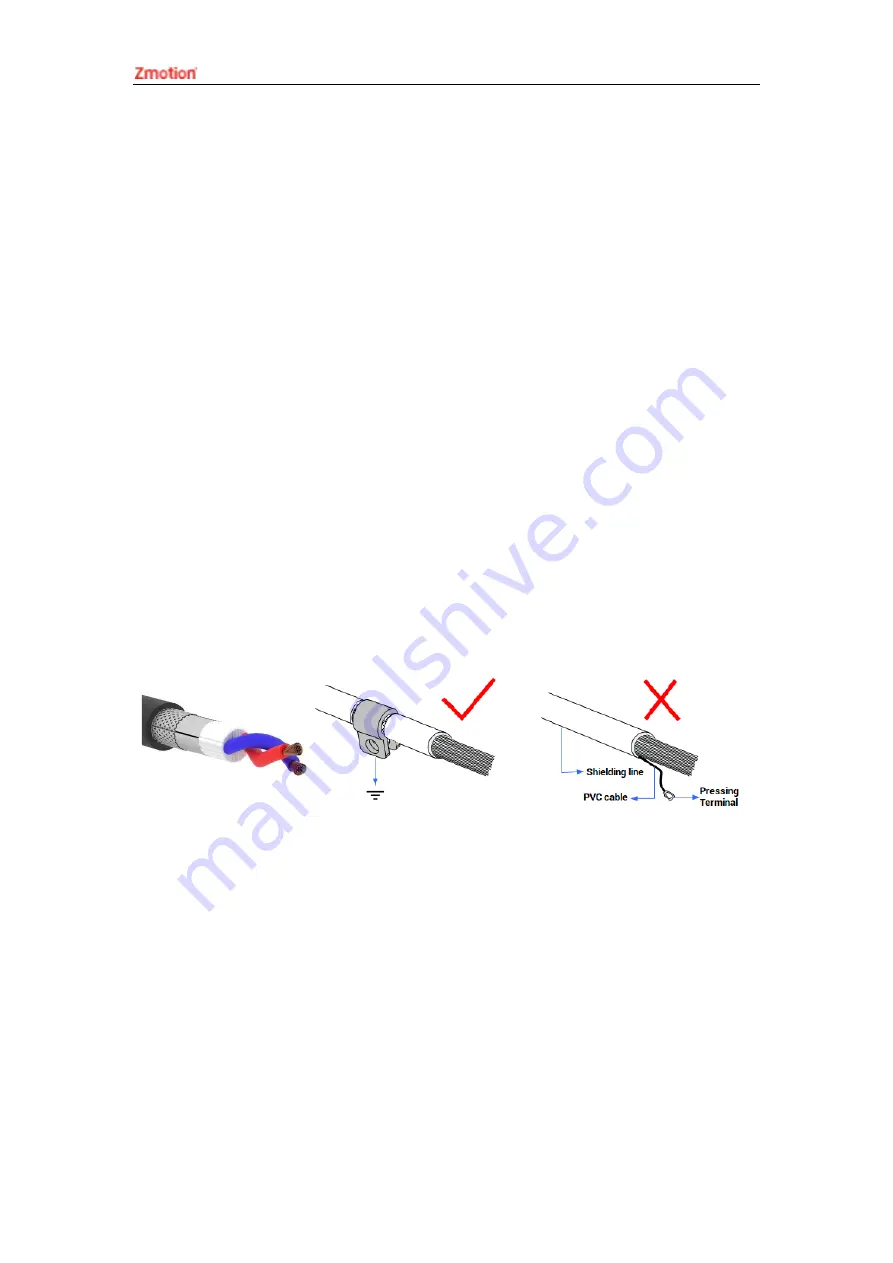
Please use STP (Shielded Twisted Pair), especially in bad environments, and make
sure the shielding layer is fully grounded.
⚫
When on-site wiring, pay attention to make the distance between strong current and
weak current, it is recommended for the distance to be more than 20cm.
⚫
It should be noted that the equipment grounding (chassis) on the entire line must be
good, and the grounding of the chassis should be connected to the standard factory
ground pile.
→
Cable Requirements:
Shielded Twisted Pair, and the shielded cable is grounded.
3.1.2.
Basic Usage Method
(1)
Please follow the above wiring instructions to wiring correctly.
(2)
After powered on, please use LAN1 or LAN2 or RS232 or RS485 to connect to
ZDevelop.
(3)
Please use “ADDRESS” and “SETCOM” commands to set parameters and check
protocol station No. Please refer to “Basic Manual”.
Summary of Contents for VPLC532E
Page 1: ......
Page 39: ...VPLCE532E Vision Motion Controller User Manual V1 5...







































































