





























XPLC108E Motion Controller User Manual V1.5
DC power supply of the external device and the controller IO power supply are in the
same power supply system, this connection can also be omitted.
3.5.2.
Basic Usage Method
(1)
Please follow the above wiring instructions to wiring correctly.
(2)
After powered on, please use any one interface among the three interfaces ETHERNET,
RS232 and RS485 to connect to ZDevelop.
(3)
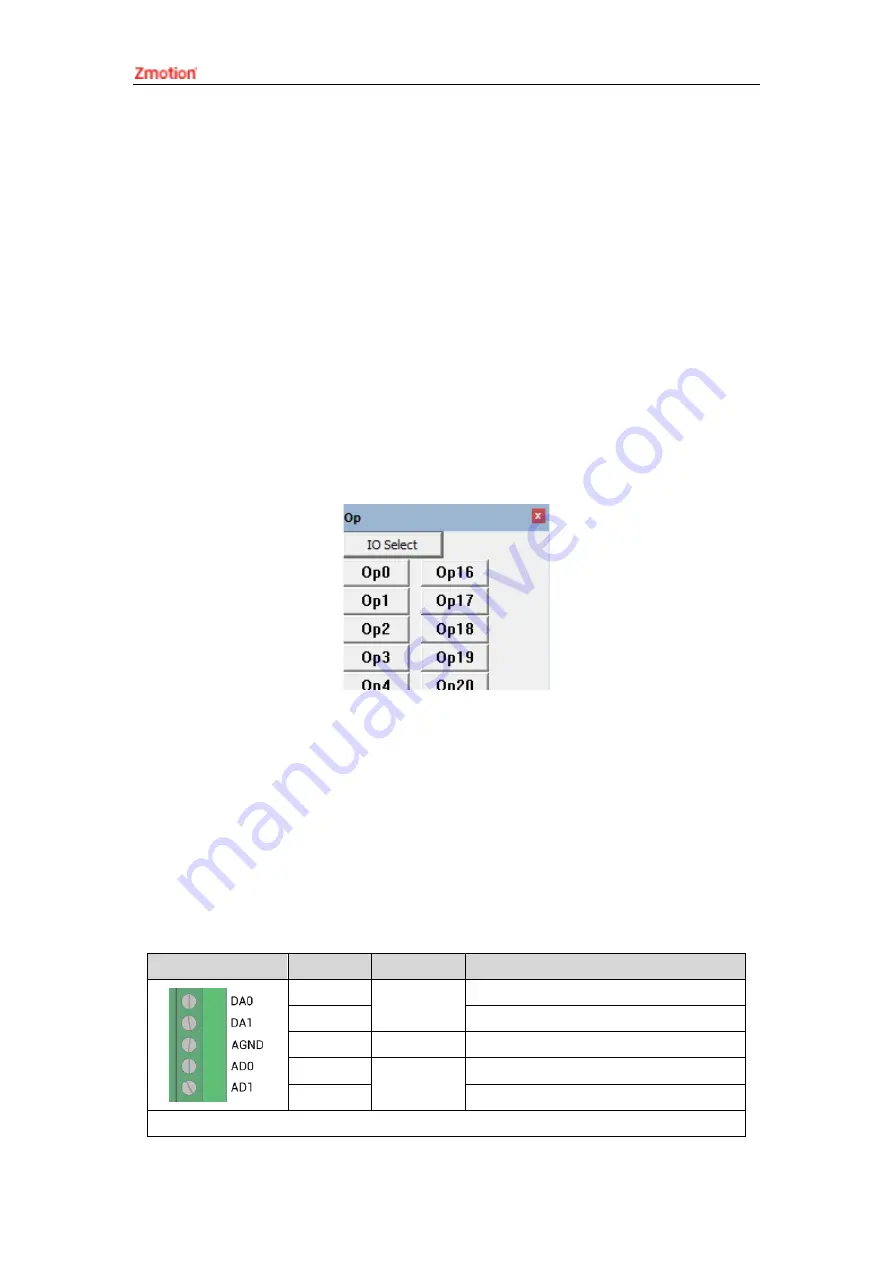
Open or close output port directly
through “
OP
” command, also, it can be
opened or
closed
through “ZDevelop/View/
Op
”. Please refer to “ZBasic” for details.
3.6.
AD/DA Analog Input / Output
The analog port adopts a set of 5Pin screw-type pluggable terminals with a spacing
of 3.81mm.
→
Terminal Definition
Terminal
Name
Type
Function
DA0
Output
Analog output terminal: AOUT(0)
DA1
Analog output terminal: AOUT(1)
AGND
Public End
Analog public end
AD0
Input
Analog input terminal: AIN(0)
AD1
Analog input terminal: AIN(1)
Note: XPLC108E internal ADDA uses internal power.
Summary of Contents for XPLC108E
Page 1: ......







































































