




























ZMC303 Motion Controller User Manual V1.5
RS422
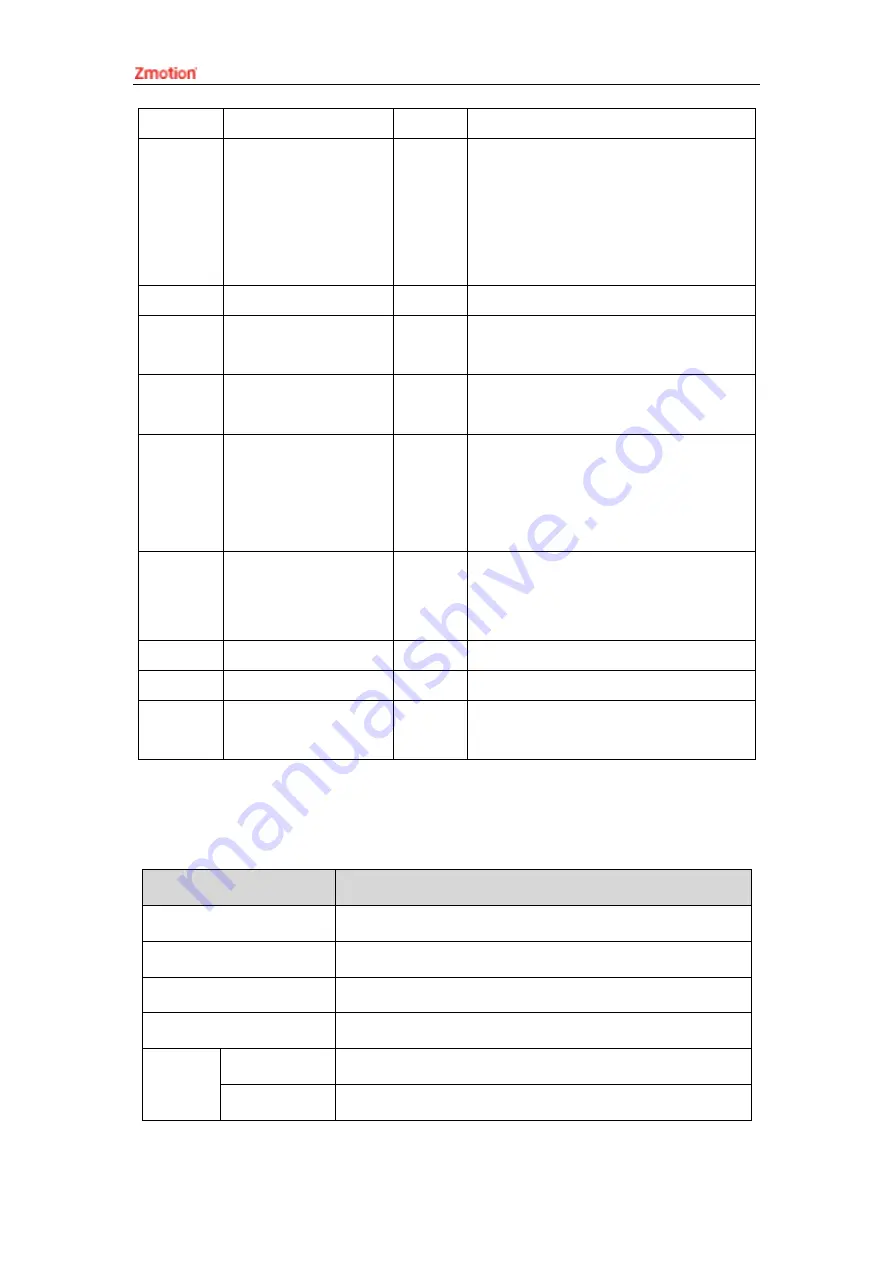
RS422 serial port (port2)
1
Use MODBUS_RTU protocol
ETHERNET
Network port
1
Use MODBUS_TCP protocol, expand the
number of network ports through the
interchanger, and the number of net port
channels can be checked through “?*port”
command, default IP address is 192.168.0.11
UDISK
U disk interface
1
Insert U disk equipment
E+24V
Main power supply
1
24V DC power, it supplies the power for
controller.
CAN
CAN bus interface
1
Connect CAN expansion modules and CAN
equipment of other standards.
IN
Digital IO input port
24+3
NPN type, the power is supplied by internal
24V power supply. There are 2 high-speed
inputs, and IN0-1 have the latch function,
IN0-2 have encoder function.
OUT
Digital IO output port
8+3
NPN Leakage type, the power is supplied by
internal 24V power supply. There are 2 high-
speed outputs, OUT0-1 have PWM function.
AD
Analog input port
2
12-bit resolution, 0-10V.
DA
Analog output port
2
12-bit resolution, 0-10V.
AXIS
Pulse axis interface
4
It includes differential pulse output and
differential encoder input.
2.4.
Work Environment
Item
Parameters
Work Temperature
-10
℃
-55
℃
Work relative Humidity
10%-95% non-condensing
Storage Temperature
-40
℃
~
80
℃
(not frozen)
Storage Humidity
Below 90%RH (no frost)
vibration
Frequency
5-150Hz
Displacement
3.5mm(directly install)(<9Hz)
Summary of Contents for ZMC303
Page 1: ......







































































