





























ZMC308BE Motion Controller Hardware Manual V1.5
connecting to a computer.
⚫
Please be sure to connect the common terminal of each communication node to
prevent the communication chip from burning out.
⚫
Please use twisted-pair shielded cables, especially in harsh environments, and make
sure the shielding layer is fully grounded.
3.3.2.
Basic Usage
(1)
Please follow the above wiring instructions for correct wiring.
(2)
After power on, please use ETHERNET or RS232 (default parameter, it can be
connected directly) to connect to ZDevelop.
(3)
Please use the "ADDRESS" and "SETCOM" commands to set and view the protocol
station number and configuration parameters, see "ZBasic Programming Manual" for
details.
(4)
Correctly set the relevant parameters of the third-party equipment according to their
respective instructions to match the parameters of each node.
(5)
When all is configured, it can start to do communicating.
(6)
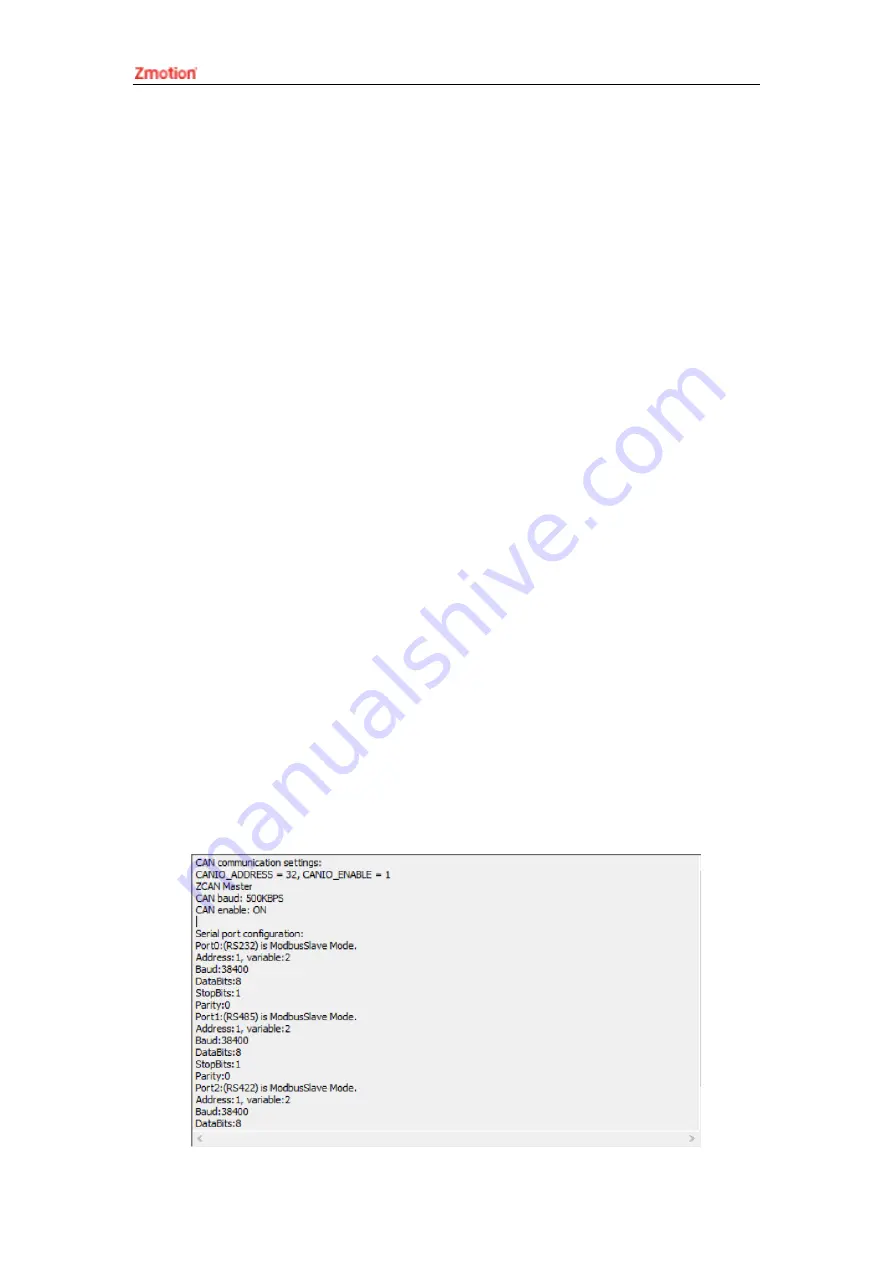
Communication data of RS232 can be directly viewed through “ZDevelop / Controller
/ State the Controller / CommunicationInfo”.
Summary of Contents for ZMC308BE
Page 1: ......







































































