





























ZMC408SCAN Motion Controller Hardware Manual V1.5
Overcurrent Protection
Valid
3.1.2.
CAN Communication Specification & Wiring
The CAN interface of the controller adopts the standard CAN communication
protocol, which mainly includes three ports, CANL, CANH and the public end. And it can
connect CAN expansion modules and other standard CAN devices.
→
Specification
Item
Description
Maximum Communication Rate (bps)
1Mbps
Terminal Resistor
120Ω
Topological Structure
Daisy Chain Topology
The number of nodes can be extended
Up to 16
Communication Distance
The longer communication distance is, the
lower communication rate is, and maximum
of 100m is recommended.
→
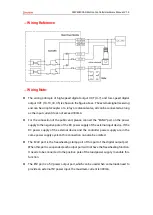
Wiring Reference
Connect the CANL and CANH of the standard CAN module to the CANL and CANH of
the controller, and connect the public ends
“
EGND
”
of the CAN bus communication parties
together, and connect a 120
Ω
resistor between CANH and CANL. (Both left and right two
CANH and CANL need one resistor respectively, please see below graphic).







































































