




























ZMC408SCAN Motion Controller Hardware Manual V1.5
→
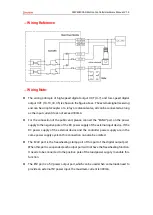
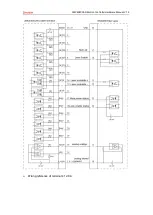
Wiring Reference:
Reference example of wiring with Panasonic A5/A6 servo driver:
→
Wiring Note:
The wiring principle of the differential pulse axis interface is shown in the figure
above, and the wiring methods of different types of drivers are different, please
connect carefully.
Please use STP, especially in bad environments, and make sure the shielding layer is
fully grounded.
3.9.2.
Basic Usage Method
(1)
Please follow the above wiring instructions to wiring correctly.
(2)
After powered on, please use any one interface among the three interfaces ETHERNET,
RS232 (default parameter, it can be connected directly) and RS485 (default
parameters, it can be connected directly, but for hardware, adapter head is needed)
to connect to ZDevelop.
(3)
Set axis parameters, such as, ATYPE, UNITS, SPEED, ACCEL, FWD_IN, REV_IN, etc.
(4)
There are many parameters related to pulse axis, they can be set and checked
through relative instructions, please see “axis parameter and axis status” of “ZBasic”,
or see “ZDevelop/View/Axis parameter”.







































































