





























ZMC408SCAN Motion Controller Hardware Manual V1.5
Overcurrent protection
NO
Isolation method
Optoelectrical isolation
IN (44-49)
Input method
PNP Source type
Input frequency
<5KhZ
Input impedance
3.3
kΩ
Input voltage level
DC24V
Voltage to ON
>7.2V
Voltage to OFF
<7.1V
Min input current
1.8mA
Max input current
7.5mA
AOUT(2)
Resolution
16-bit
Data range
0-65535
Signal range
0-10V
Data refresh ratio
1kHz
Load impedance
<10
Ω
AIN (2)
Resolution
16-bit
Data range
0-65535
Signal range
0-10V
Data refresh ratio
1kHz
Load impedance
>3.3k
Ω
→
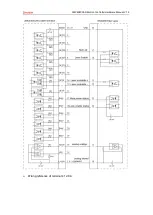
Wiring Reference
➢
Wiring reference of 16-DA in LASER interface:







































































