





























ZMC408SCAN Motion Controller Hardware Manual V1.5
4.2.
Basic Usage Method
1.
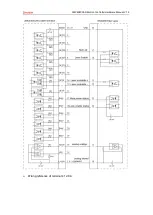
Please wiring correctly according to above wiring description.
2.
Please select one interface among EtherNET, RS232 (default parameters can be
directly connected) and RS485 (default parameters can be connected directly, need
to use adapter head for hardware) to connect ZDevelop.
3.
Set fundamental motion parameters, such as, Atype, Units basic axis parameters
(preset Units as 65536 / the max galvanometer breadth.
4.
There are many parameters relate to pulse axes, and they are set and checked
through relative instructions, please see “axis parameter and axis status” in “
ZBasic
Program Manual
” for details, also can be vi
ewed through
“ZDevelop/View/
axis
parameter”.
5.
Through “ZDevelop/View/Manual”, relative motions can be operated and controller.
Refer to BASIC routine:
B
ASE (4, 5) ‘select axis Scan 0, Scan 1 relates to axis 6 and axis 7
ATYPE = 21, 21
‘select axis 4 and axis 5 as galvanometer axes type
U
NITS = 200, 200 ‘set pulse amount of axis 4, 5 as the unit of 200 bit
Dpos = 0, 0
Force_Speed = 100, 100 ‘set axis 4, motion speed of 5Scan is 100*200 bit/s
MoveScanAbs(0, 0)
‘galvanometer moves to center origin position
M
oveScan(50) Axis(4) ‘axis 4 moves 50*200 bits forward
MoveScan(-
50) Axis(5) ‘axis 5 moves 50*200 bits reverse







































































