



























ZMC416BE Motion Controller User Manual V1.5
→
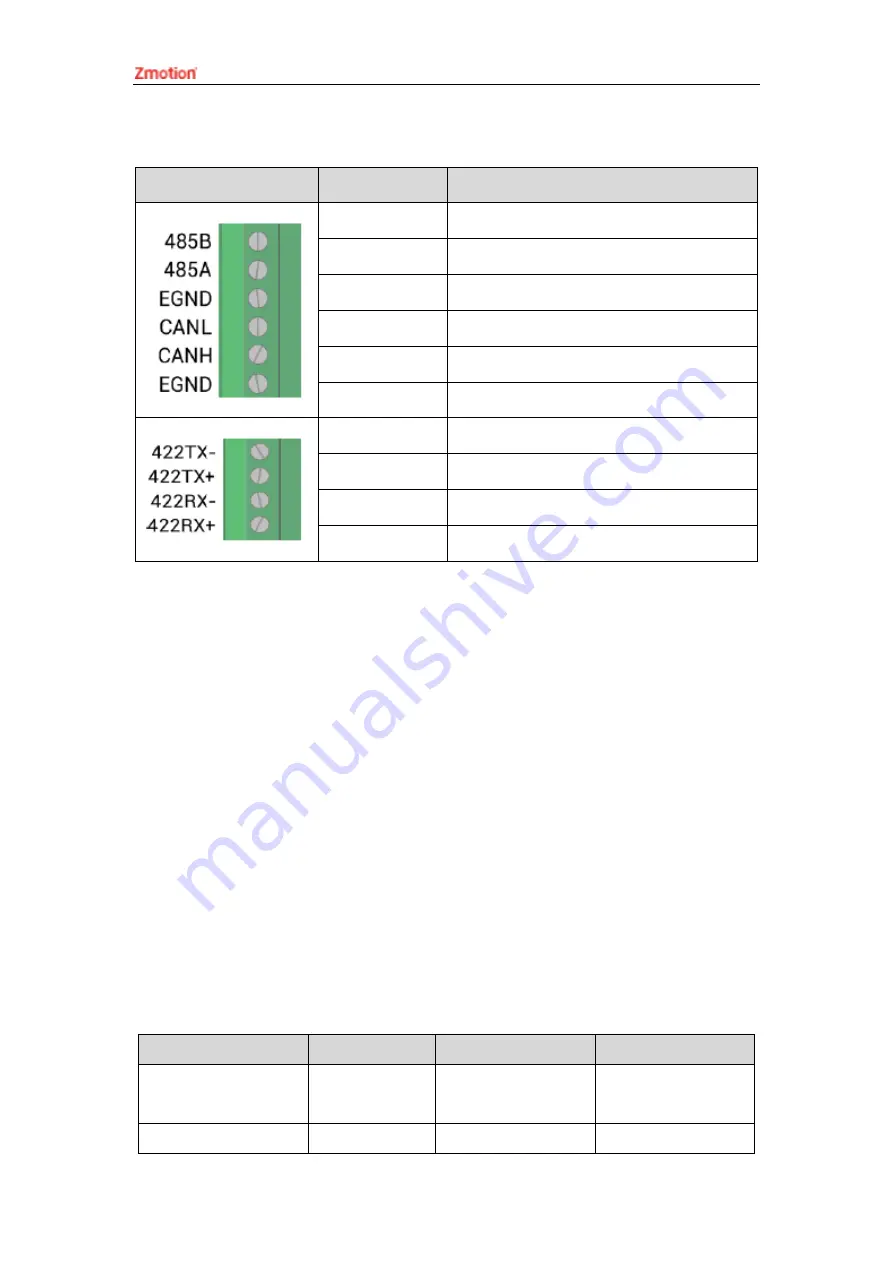
Terminal Definition:
Terminal
Name
Function
485B
485-
485A
485+
EGND
External power supply ground
CANL
CAN differential data -
CANH
CAN differential data +
EGND
External power supply ground
422TX-
RS422 send -
422TX+
RS422 send +
422RX-
RS422 receive -
422RX+
RS422 r
3.2.1.
RS485, RS422, CAN Communication Specification
& Wiring
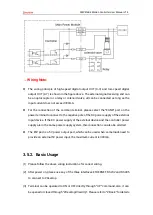
The RS485 serial port supports the MODBUS_RTU protocol and custom
communication, mainly including 485A, 485B and common port.
The CAN interface of the controller adopts the standard CAN communication
protocol, which mainly includes three ports, CANL, CANH and the common port. And it
supports connecting CAN expansion modules and other standard CAN devices.
RS422 serial port supports MODBUS_RTU protocol and custom communication,
mainly including 422TX-, 422TX+, 422RX-, 422RX+ and common port.
→
Specification
Item
RS485
CAN
RS422
Max Communication
Rate (bps)
115200
1M
115200
Terminal Resistor
/
120Ω
/
Summary of Contents for ZMC416BE
Page 1: ......







































































