





























ZMC432 Motion Controller User Manual V1.5
(3)
Analog input voltage can be read through “AIN” command and corresponding analog
voltage can be output
through “
AOUT
” command, also,
data of each channel can be
checked
through “ZDevelop/
View/AD/DA
”. Please refer to “ZBasic” for
details.
3.7.
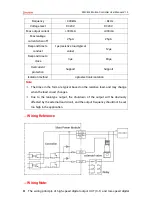
U Disk
The ZMC432 motion controller provides a USB communication interface, which can
insert the U disk device. It is used for ZAR program upgrading, controller data importing
and exporting, file 3 executing, etc. Its schematic diagram is shown in the figure below:
→
Specification
Item
USB2.0
Highest Communication Ratio
12Mbps
Max Output Current of 5V
500mA
Whether Isolates
No
3.8.
ETHERNET
ZMC432 motion controller has a 100M network port, and it supports MODBUS_TCP
protocol and custom communication, the default IP address is 192.168.0.11. The pin
definition is as follows:
Summary of Contents for ZMC432
Page 1: ......







































































