



























ZMC460N Motion Controller User Manual V1.5
→
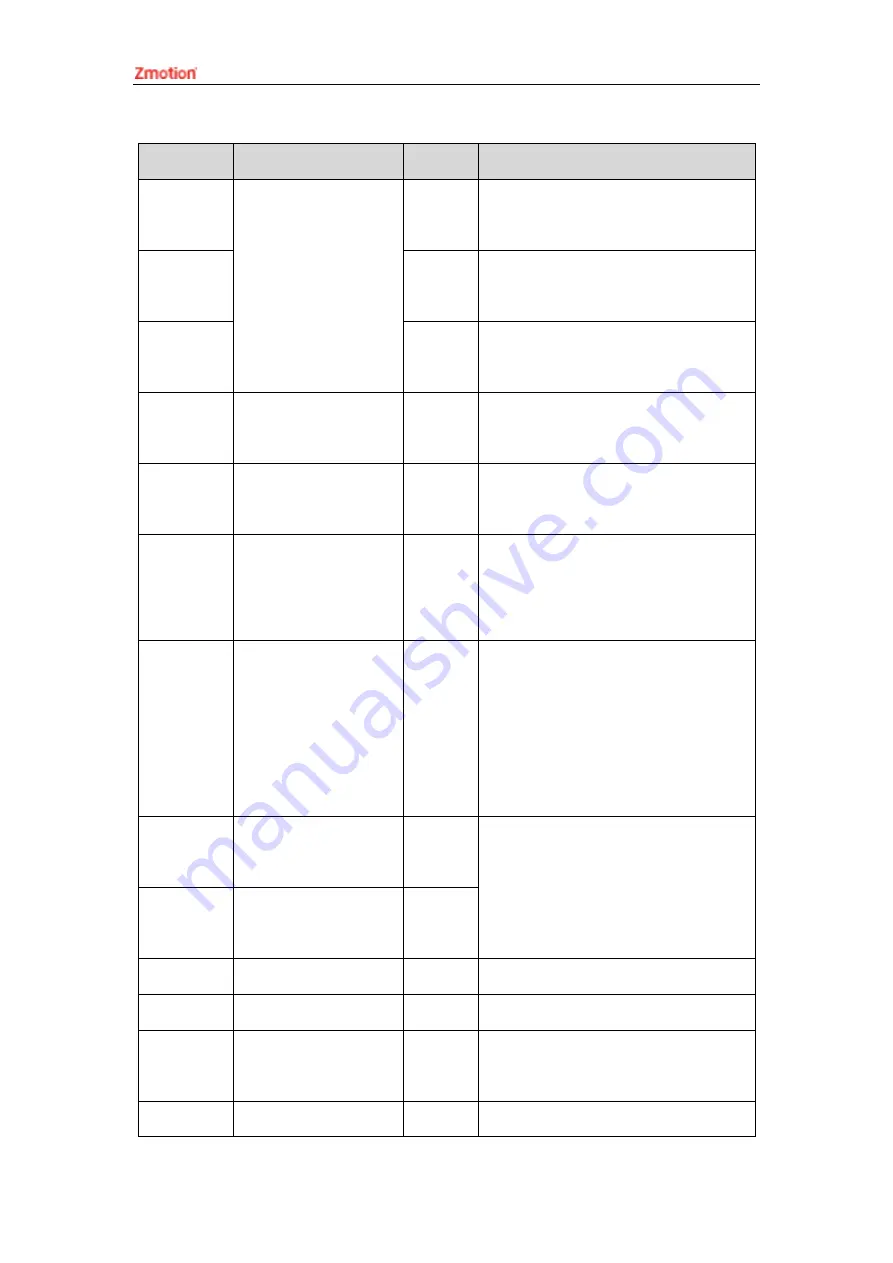
Interface Description
Mark
Interface
Number
Description
POW
Status Indication
Light
1
Power indicator: it lights when power
is conducted.
RUN
1
Run indicator: it lights when runs
normally
ALM
1
Error indicator: it lights when runs
abnormally
RS232
RS232 serial port
(port0)
1
Use MODBUS_RTU protocol
RS485
RS485 serial port
(port1)
1
Use MODBUS_RTU protocol
EtherCAT
EtherCAT bus
interface
1
EtherCAT bus interface, connect to
EtherCAT bus drive and EtherCAT bus
expansion module
ETHERNET
Ethernet
1
Use MODBUS_TCP protocol, expand
Ethernet through interchanger, the
number of net port channels can be
checked through “?*port”, default IP
address id 192.168.0.11
RTEX TX
RTEX bus sending
side
1
RTEX bus is used to connect
Panasonic RTEX servo drive.
RTEX RX
RTEX bus receive
side
1
UDISK
U disk interface
1
Insert U disk equipment
E+24V
Main power
1
24V DC power supplies for controller
CAN
CAN bus interface
1
Connect CAN expansion module and
CAN equipment of other standards
IN
Digital IO input
24
Leakage type, internal 24V supply
Summary of Contents for ZMC460N
Page 1: ......







































































