



























6
❸ Uti lización
3.1 I Principio de funcionamiento
El robot es independiente del sistema de fi ltración y puede funcionar de manera autónoma simplemente conectado a
la red.
Se desplaza de manera ópti ma para limpiar las zonas de la piscina para las que se ha diseñado (según el modelo: «fondo
solo», «fondo y paredes»). Los residuos son aspirados y almacenados en el fi ltro del robot.
La caja de control permite controlar a distancia su robot y dar un primer diagnósti co.
3.2 I Preparación de la piscina
• Este producto está desti nado a una uti lización en piscinas instaladas de manera permanente.
No uti lice el robot en piscinas desmontables. Una piscina permanente está construida en el
suelo o sobre el suelo y no puede desmontarse fácilmente y guardarse.
•
El robot debe funcionar en un agua de piscina cuya calidad sea la siguiente:
Temperatura del agua
Entre 15°C y 35°C
pH
Entre 6.8 y 7.6
Cloro
< 3 mg/ l
•
Cuando la piscina esté sucia, en parti cular durante la puesta en servicio, reti re los fragmentos más grandes con la
ayuda de una red para opti mizar los rendimientos del robot.
•
Reti re termómetros, juguetes y otros objetos que pueden dañar al robot.
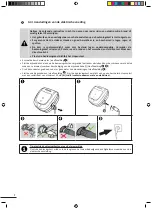
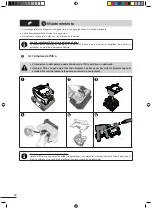
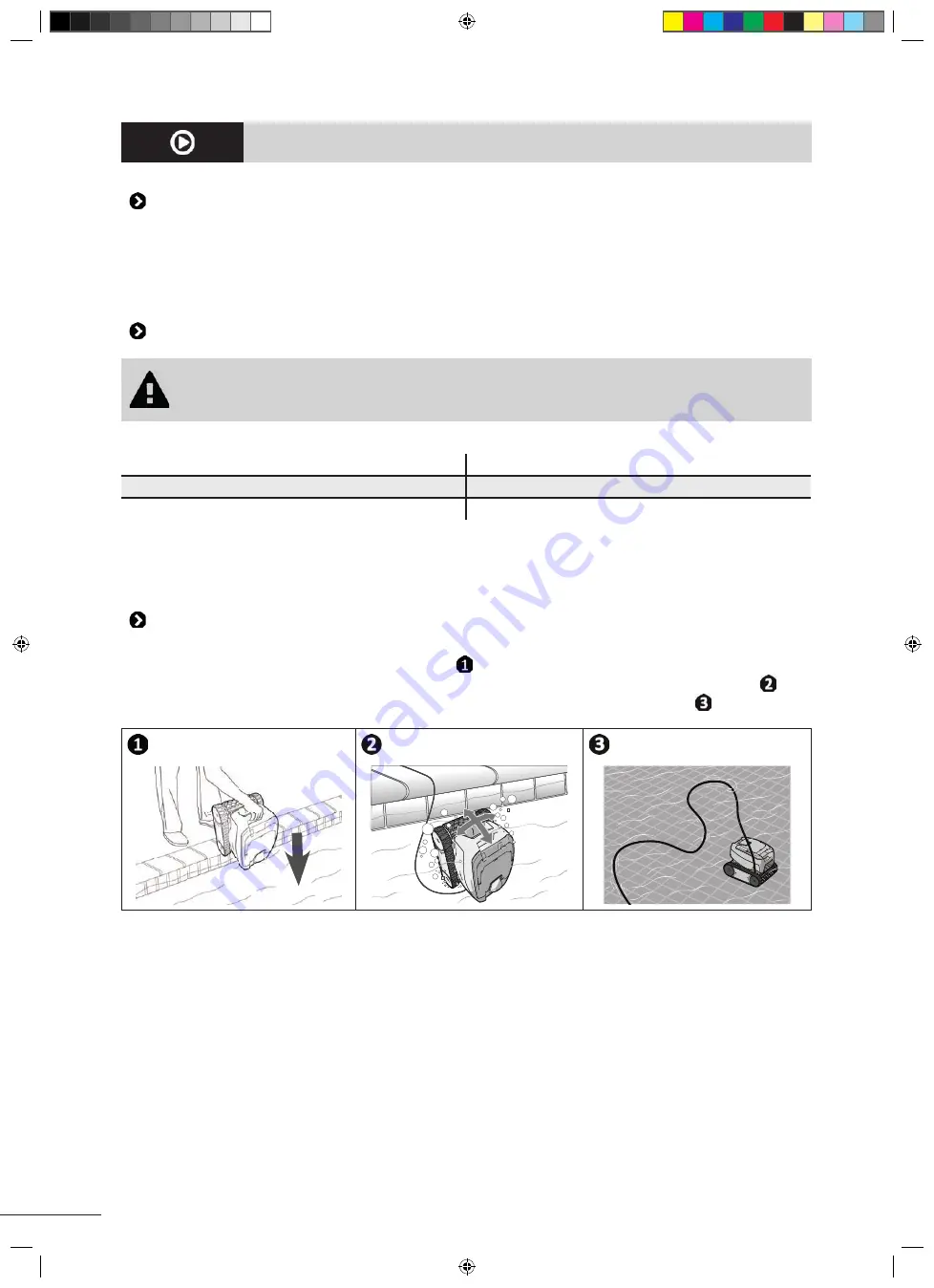
3.3 I Inmersión del robot
•
Desenrolle la longitud de cable necesaria en el agua.
•
Sumerja el robot en el agua verti calmente (ver imagen ).
•
Muévalo ligeramente en todas las direcciones para que el aire contenido en el robot se escape (ver imagen ).
•
Es indispensable que el robot se sumerja solo y se pose sobre el fondo de la piscina (ver imagen ).
Summary of Contents for TornaX
Page 2: ......




































































