





























Error solution
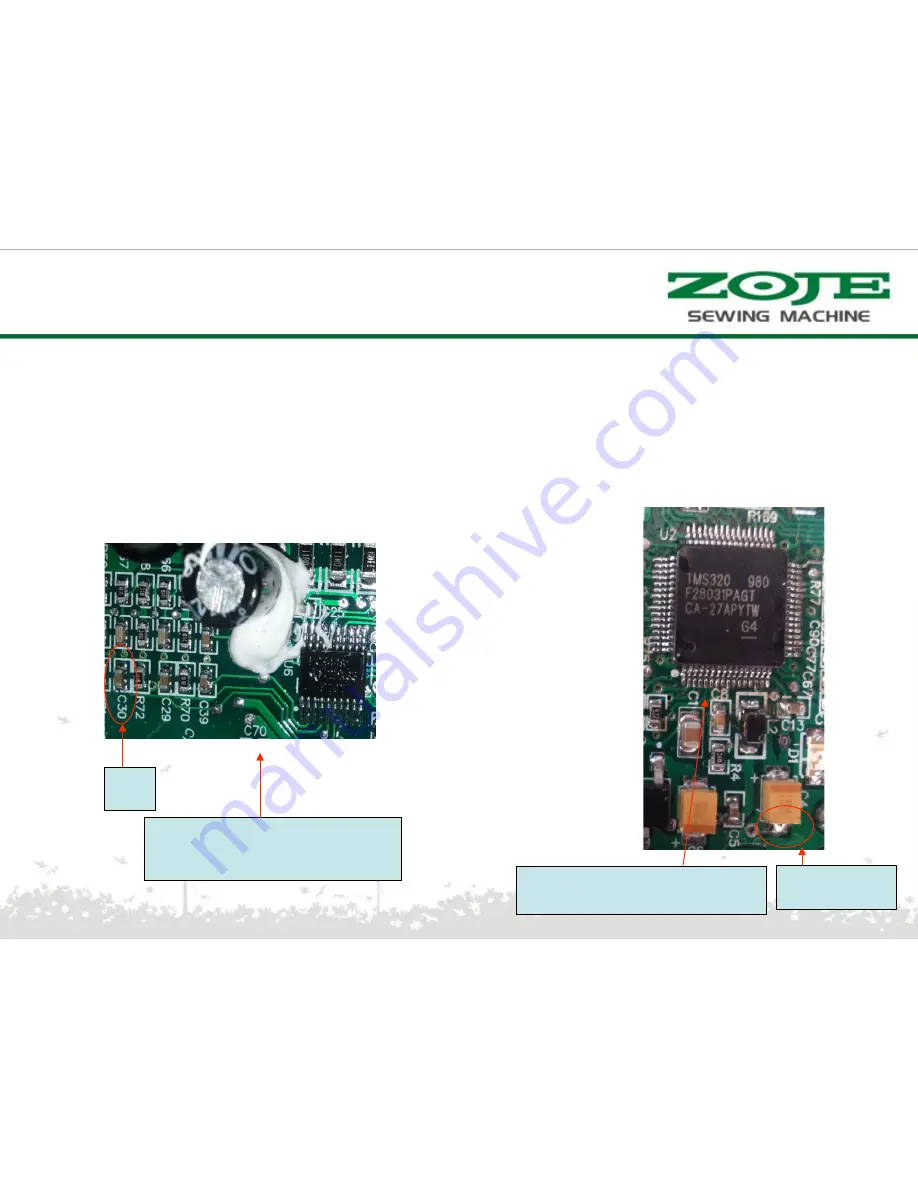
5. Check the C30 two side impedance which on the main board: around 11K
,
the standby voltage:5.2V
6. Check the U2 (49pin) or U6 (16pin ) impedance to C4 negative terminal: around 3M, use 80Visolating
transformer to supply power , the standby voltage:3.2V
U6
【
chip model
:
74LVC244
】
Stitch as above
C30
20
11
10
1
C4 negative
terminal
U2
【
TMS320F28031/64PIN
】
Stitch as above
1
1
6
17
32
33
48
49
64
Summary of Contents for WR580
Page 1: ...WR580 PRODUCT MANUAL V1 0 ...
Page 2: ...Application Model Code Hardware Structure Error Solution Catalogue ...
Page 5: ...Composition of the product ...
Page 9: ...Model description motor Motor model serial number ...
Page 21: ...Function Aging mode Press to enter the aging mode Then press to start press again to stop ...
Page 24: ...External interface definition power 1 2 3 4 Ground wire Power Socket definition L N ...
Page 28: ...Main board PCBA appearance ...
Page 29: ...Control box theory diagram ...
Page 60: ...谢 谢 ...







































































