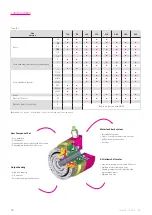
Harmonic Drive CHA, Engineering Data
The Viessmann CHA provides efficient heating solutions for residential and commercial spaces. Designed to ensure optimal performance, our user-friendly manual offers comprehensive Service Instructions for Contractors. Download this essential resource for free from 88.208.23.73:8080 and gain valuable insights to maximize the CHA's capabilities and provide superior service to your clients.
Share
Download















Reviews:
No comments
Related manuals for CHA

2600 Series
Brand: Farris Engineering Pages: 12

BT-100
Brand: Eastern Times Technology Pages: 4

10
Brand: Vacon Pages: 18

B2000
Brand: Wasp Pages: 16

HS2
Brand: Hansen Pages: 4

Liberty
Brand: Jeep Pages: 32

300+
Brand: Accel Pages: 8

ARGOS
Brand: Gascat Pages: 32

MDC-700 Series
Brand: ICP DAS USA Pages: 4

I-7080
Brand: ICP DAS USA Pages: 6

EIP-2000 Series
Brand: ICP DAS USA Pages: 19

Gemini GEM-P9600
Brand: NAPCO Pages: 6

Gemini GEM-P816
Brand: NAPCO Pages: 56

SCXI -1122
Brand: National Instruments Pages: 17

Torrium 2 TT45
Brand: Davey Pages: 12

NS-GPS4RC101
Brand: Insignia Pages: 2

PID-4CH-SSR
Brand: Thermomart Pages: 6

2K COMFORT
Brand: WAGNER Pages: 128





















































