

Chassis
1 piece
Battery container
1 piece
Wheel
2 pieces
Deceleration
DC motor
2 pieces
Hammer caster
1 piece
Fastener
4 pieces
Encoder disc
2 pieces
Switch
1 piece
M3*30 screw 4 bars
M3*6 screw 8 bars
M3 nut 6 pieces
M2 nut 2 pieces
L12 spacer 4 bars
M3*8 screw 2 bars
M2*8 screw 5 bars
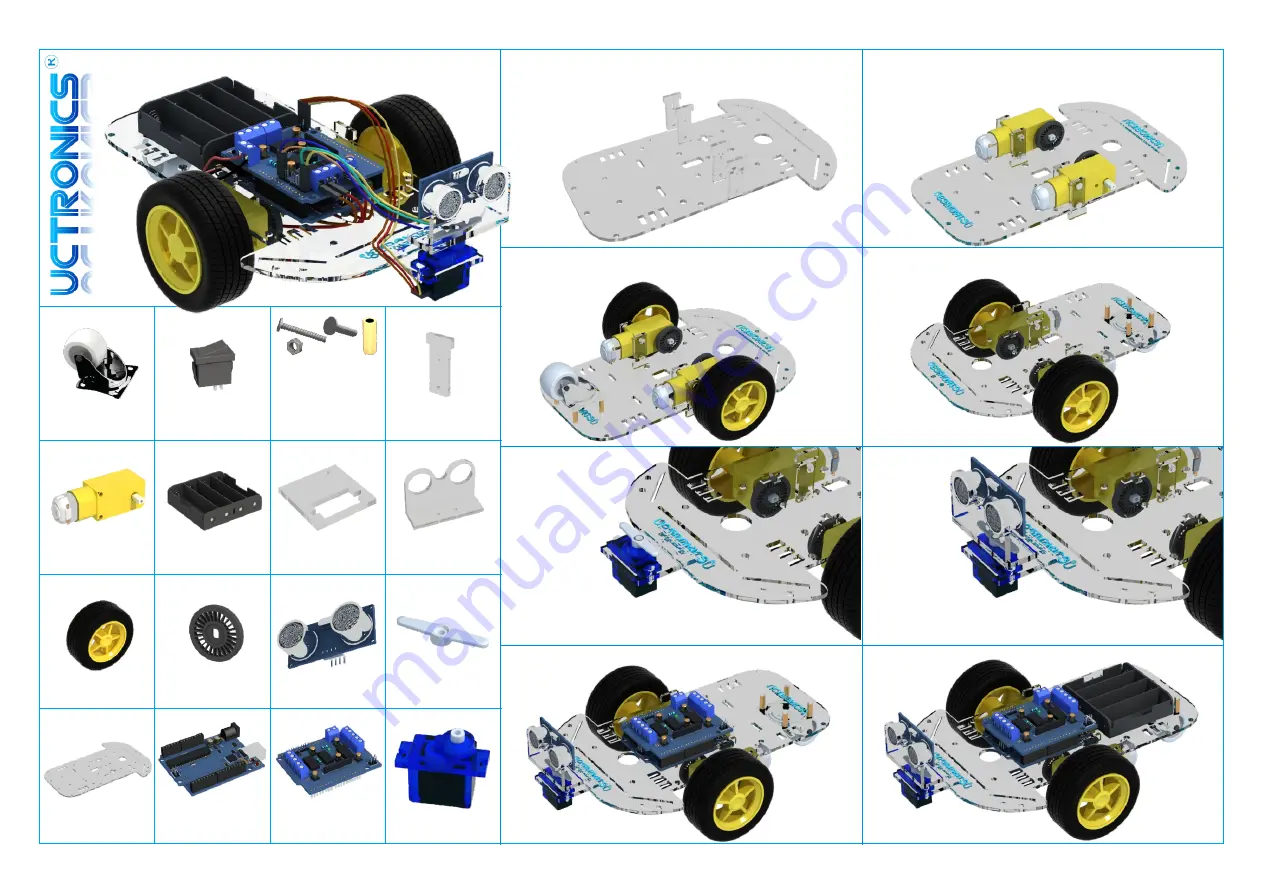
Step1: Tear off the yellow
protection wrap of the chassis, the
fastener and the encoder disc.
Insert the fastener into the
chassis.
Step2: Install the encoder disc and
x the motor to the chassis.
(Attention,the copper sheet of the
leading wire of the motor should
face inside).
Step3: Fix the motor to the chassis,
then insert and tighten the screws.
Insert the motor to the shaft
of the wheel.
Step4: Insert the spacer and tighten
the 8 screws to x the hammer caster.
Servo
1 piece
Servo bracket
1 piece
Ultrasonic bracket
1 piece
Servo accessories
1 piece
Arduino board
1 piece
Motor drive board
1 piece
Ultrasonic module
1 piece
Step5: Fix the servo bracket,
install the servo,x the servo accessories.
Step6: Fix the ultrasonic bracket,
install the ultrasonic module.
Step7:Connect the Arduino board
with the motor drive board,
place it on the chassis.
Step8:Position the battery container on the chassis.
Need to use:
M3*30 screw 4 bars
M3 nut 4 pieces
Need to use:
L12 spacer 4 bars
M3*6 screw 8 bars
Need to use:
M3*8 screw 2 bars
M3 nut 2 pieces
M2*8 screw 3 bars
M2 nut 2 pieces
Need to use:
M2*8 screw
2 bars







































































