




























Memory Map
ARM DDI 0186A
Copyright © 2000 ARM Limited. All rights reserved.
3-3
3.2
Tightly-coupled SRAM address space
The tightly-coupled
Instruction SRAM
(I-SRAM) and
Data SRAM
(D-SRAM) are
located at the bottom of the memory map. Each SRAM is allocated a 64MB address
space, the bottom 64MB space mapping to I-SRAM and the next 64MB range mapping
to D-SRAM.
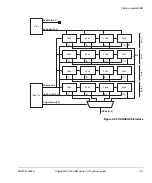
In practice, each SRAM is likely to be much smaller than the 64MB allowable and the
address decode is implemented so that each memory is aliased throughout its 64MB
range. See Figure 3-2 for an example of a 16KB I-SRAM aliased through the 64MB
address space.
Figure 3-2 I-SRAM aliasing example
All accesses to addresses above the 128MB combined SRAM address space result in
AMBA AHB transfers controlled by the
Bus Interface Unit
(BIU).
An instruction fetch from the ARM9E-S core to the D-SRAM address space goes to the
AHB, regardless of whether the D-SRAM is enabled. A data interface access from the
ARM9E-S core can access both the D-SRAM
and
the I-SRAM. The ability to
additionally access the I-SRAM is required to allow the fetching of inline literals within
code, for programming of the instruction I-SRAM, and for debugging purposes.
When an SRAM is disabled, all accesses to its address space go to the AHB. When
enabled, the SRAM must be programmed before use. The tightly-coupled SRAMs can
be enabled or disabled during reset depending on the value of the input pin
INITRAM
.
Several boot options are available using
INITRAM
and the exception vectors location
pin
VINITHI
. These are discussed in
D-SRAM space
I-SRAM alias #1
I-SRAM (16KB)
0x0400 0000
0x03FF FFFF
0x03FF C000
0x0000 BFFF
0x0000 8000
0x0000 7FFF
0x0000 4000
0x0000 3FFF
0x0000 0000
I-SRAM alias #2
I-SRAM alias #4095
Summary of Contents for ARM966E-S
Page 6: ...Contents vi Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Page 20: ...Introduction 1 4 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Page 48: ...Tightly coupled SRAM 4 12 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Page 80: ...Bus Interface Unit 6 20 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Page 118: ...Debug Support 8 26 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Page 130: ...Test Support 10 8 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Page 142: ...Instruction cycle timings 11 12 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Page 158: ...Signal Descriptions A 16 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...
Page 176: ...AC Parameters B 18 Copyright 2000 ARM Limited All rights reserved ARM DDI 0186A ...







































































