









9. Program upload
To program the robot you need to have a computer with the Arduino IDE installed.
The connected Beetle will show up as a Leonardo. Please choose this and select the proper COM
port. Open the previous downloaded file
insectbot_hexa_en.ino
and upload it to the Beetle.
Once it's done without errors the InsectBot Hexa is ready to take his first steps.
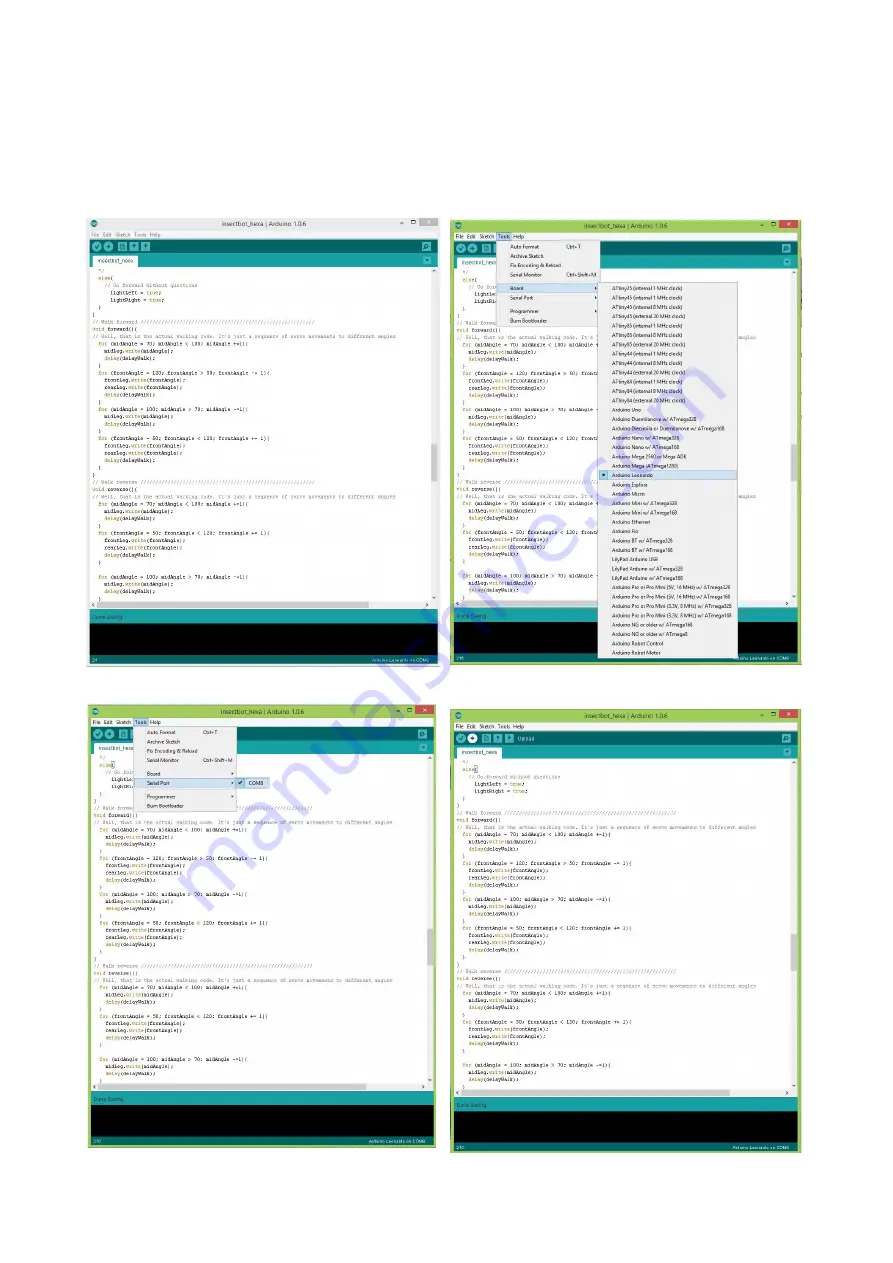
Illustration 1: Open the program file
Illustration 2: Choose Leonardo as board
Illustration 4: Upload the program by clicking
on the white arrow button in the top
Illustration 3: Choose the port (this my be
different on your computer)
































































