C
ONFIGURATION
C
OMMAND
S
ET
- F
IRMWARE
R
EVISION
2.4.0_
BETA
-
V
ERSION
1.0.0
3.2.16 MOTION parameter
3.2.16.1 MOTION.FILTER
Parameter syntax
MOTION.FILTER=<
a_step>,<g_step>,<abs_b>,<min_abs>
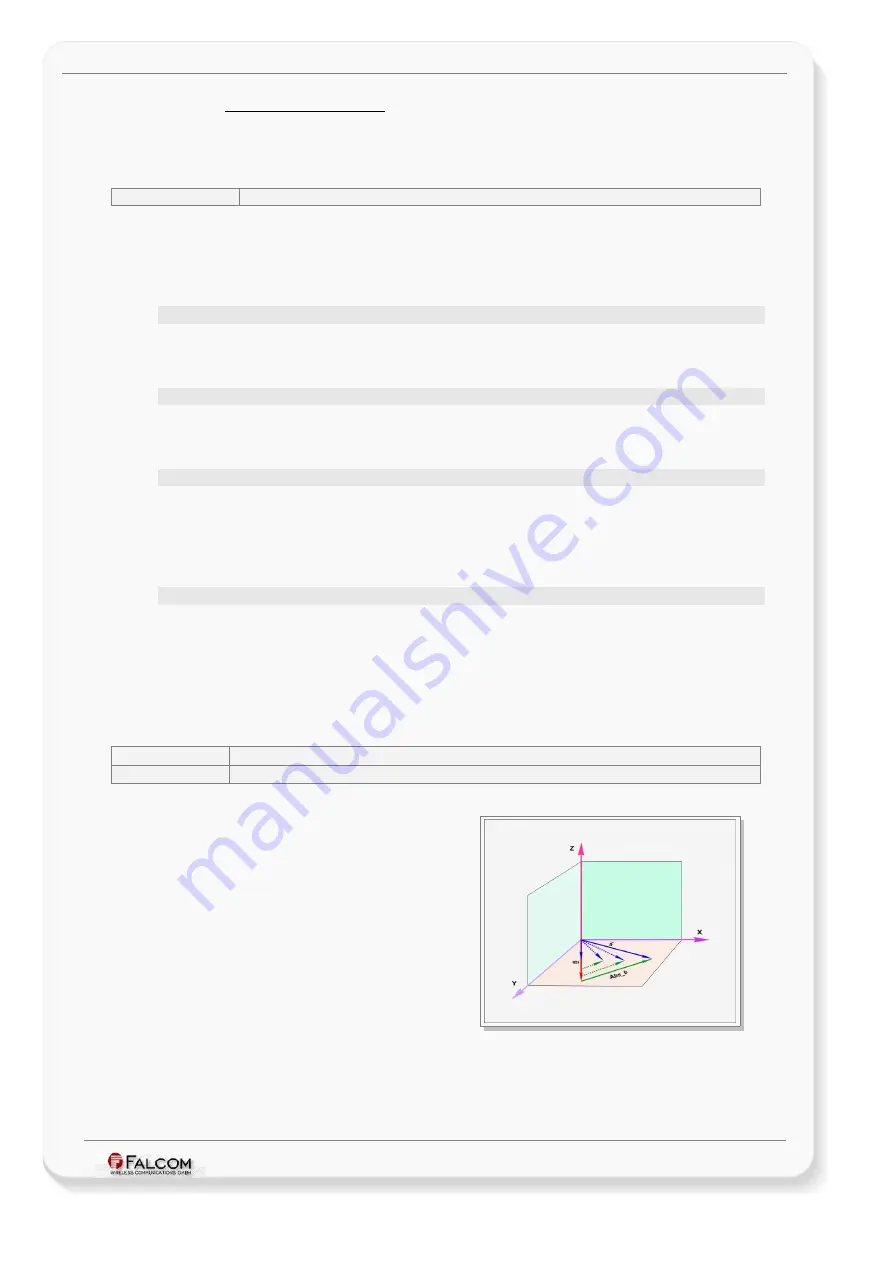
This parameter defines the configuration settings for filtering conditions of device
motions. Based on the filter values, system raises events when device moves and
device stops – use figure below as a reference. This configuration will also be used
to wake up the MAMBOII device from the Motion sleep mode, for details see
chapter
<a_step>
Set a value in a range of
1
.
..
10
which determines the sensitivity on which an
average acceleration vector will be calculated each second
.
The lower the set
value, the more sensitive is the motion of the device.
<g_step>
Set a value in a range of
10
.
..
50
which determines the sensitivity on which an
average gravitation vector will be calculated each second
.
The lower the set
value, the more sensitive is the motion of the device.
<abs_b>
Set a maximum difference value between the gravitation vector and
acceleration vector in a range of
1…255
that you will accept as a match (the
set value is used to detect whether the device is moving). Any other value
greater than the set value counts as a disagreement (system raises the motion
moving event
[IO.Motion.eMoving]
).
<min_abs>
Set a minimum value difference value between the gravitation vector and
acceleration vector, in a range of
1...255
AND less then or equal (
≤
)
to the set
value
,
that you will accept as a match (the set value is used to detect
whether the device is standing). Any other value less than the minimum set value
counts as a disagreement (system raises the motion standing event
[IO.Motion.eStanding]
).
How to set/get Motion configuration:
Set configuration
$PFAL,Cnf.Set,MOTION.FILTER=
4,20,10,2
Get configuration
$PFAL,Cnf.Get,MOTION.FILTER
Figure 6:
Filtering in motion
This confidential document is a property of FALCOM and may not be copied or circulated without previous permission.
Page 171 of 271