





























Enhanced Time Processing Unit (eTPU2)
29-62
Freescale Semiconductor
PXR40 Microcontroller Reference Manual, Rev. 1
29.3.3.3
Time Slot Latency
Latency is the amount of time between a service request and the beginning of service on that channel. The
following factors affect latency:
•
Number of active channels
•
Number of channels on a priority level
•
Number of available time slots on a priority level
•
Number of microcycles required to execute a thread of a Function
•
Number of SDM accesses during execution of a Function thread
•
eTPU clock frequency.
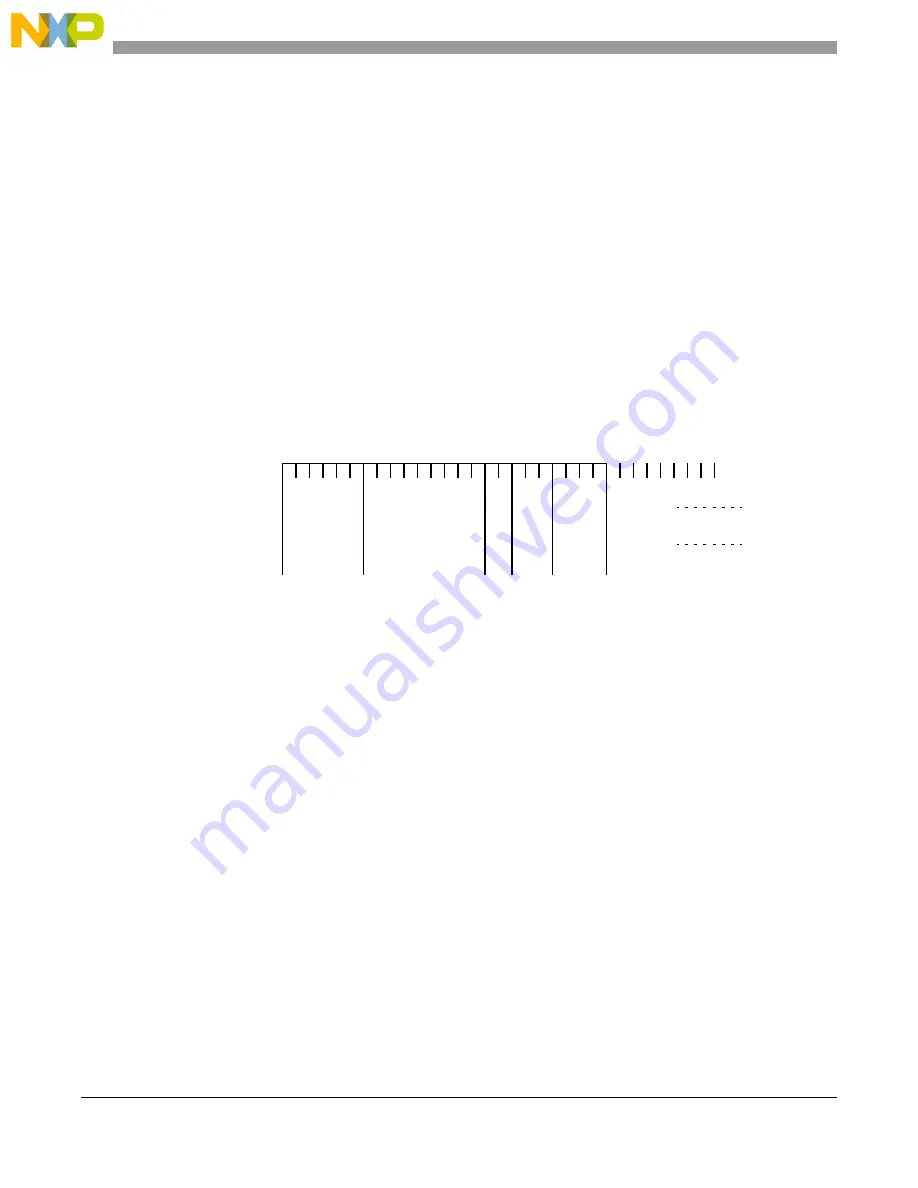
Each time slot may require a different number of microcycles, depending on the thread of a Function to be
executed. This variation is shown in
For more details on latency evaluation, see
Section 29.4.2, Estimating Worst Case Latency
.
Figure 29-30. Time-Slot Variation
29.3.4
Parameter Sharing and Coherency
SDM can be concurrently accessed by Host and Microengines (two in a Dual eTPU Engine system). In
general, there is no guaranteed order by which a group of parameters is accessed, which may lead to a lack
of internal consistency if two or more related parameters are read when only part of them is updated.
eTPU provides mechanisms to guarantee parameter coherency. The most generic mechanisms for
Host-eTPU coherency, suitable for any number of parameters, are:
•
the use of Transfer Service Thread mechanism.
•
the mailbox (or “software semaphore”) mechanism.
These mechanisms, described in
Section 29.4.1, Multiple Parameter Coherency Methods
, use microcode
to transfer parameters from temporary buffers in SDM to their definitive locations (or vice-versa). These
methods have the disadvantage of wasting processing and code memory resources.
eTPU also provides a
Coherent Dual-parameter Controller - CDC
- mechanism. It is used by Host to
coherently transfer pairs of parameters from/to a parameter buffer located on SDM to/from the locations
on SDM where parameters are accessed directly by the channels. Coherency is guaranteed by SDM access
arbitration. Although limited to two parameters only, it has lower latency and wastes no microengine
resources
1
Section 29.3.4.2, Coherent Dual-parameter Controller - CDC
.
Microcycles
Time Slot
Fixed Priority Level
1
2
3
4
5
H
M
H
L
H
6
M
Summary of Contents for PXR4030
Page 1: ...PXR40 Microcontroller Reference Manual Devices Supported PXR4030 PXR4040 PXR40RM Rev 1 06 2011...
Page 30: ...PXR40 Microcontroller Reference Manual Rev 1 Freescale Semiconductor xxx...
Page 40: ...PXR40 Microcontroller Reference Manual Rev 1 xl Freescale Semiconductor...
Page 66: ...Memory Map PXR40 Microcontroller Reference Manual Rev 1 2 4 Freescale Semiconductor...
Page 120: ...Signal Descriptions 3 54 Freescale Semiconductor PXR40 Microcontroller Reference Manual Rev 1...
Page 860: ...FlexCAN Module 24 50 Freescale Semiconductor PXR40 Microcontroller Reference Manual Rev 1...
Page 1167: ...Decimation Filter Freescale Semiconductor 28 53 PXR40 Microcontroller Reference Manual Rev 1...
Page 1168: ...Decimation Filter 28 54 Freescale Semiconductor PXR40 Microcontroller Reference Manual Rev 1...







































































