





























Boot Assist Module (BAM)
Freescale Semiconductor
9-9
PXR40 Microcontroller Reference Manual, Rev. 1
•
Uses message buffers in CAN_A for program stack and variables
•
Polls the FMPLL_SYNCR[LOCK] bit until it indicates that the PLL has locked
•
Switches the system clock source to the PLL, by setting SIU_SYSDIV[SYSCLKSEL] = 0x2
•
Disables the core watchdog timer and sets the SWT timeout period to 2.5 x 2
27
cycles
•
Waits for the host to send a 64-bit password by either the CAN or SCI
•
Receives start address, size of download code in bytes, and VLE bit
•
Receives the application code data
•
Disables the SWT and enables the core watchdog timer with a timeout period of 2.5 x 2
27
systemclock cycles
•
Branches to the loaded code at the start address
The MMU setup depends on how the BAM entered the serial boot mode. If it attempted to boot from the
development bus but switched to serial boot because it could not find a valid RCHW in Flash, the MMU
is set up as for that mode (see
). Otherwise the MMU setup matches the
.
The serial boot mode can run in two modes, depending on the state of the EVTO pin during reset (the
SIU_RSR[ABR] bit reflects the inverted state of the EVTO pin):
•
Standard serial boot mode — fixed baud rates derived from the MCU system frequency. EVTO pin
is kept high during reset.
•
Baud Rate Detection serial boot mode — allows communication with adaptable speed, based on
measured baud rate of the host transmission. EVTO pin has to be driven low for this mode.
The EVTO pin is pulled up by an internal pull-up. Actively driven low EVTO pin selects the Baud Rate
Detection mode.
When the Fixed Baud Rate mode is selected, the BAM program configures the RXD_A pin to be the input
of the eSCI_A module, CNRX_A pin as an input, and CNTX_A as an output of the CAN_A module. When
Baud Rate Detection mode is selected, the BAM program configures RXD_A and CNRX_A pins as GPI
inputs for polling their state by the CPU.
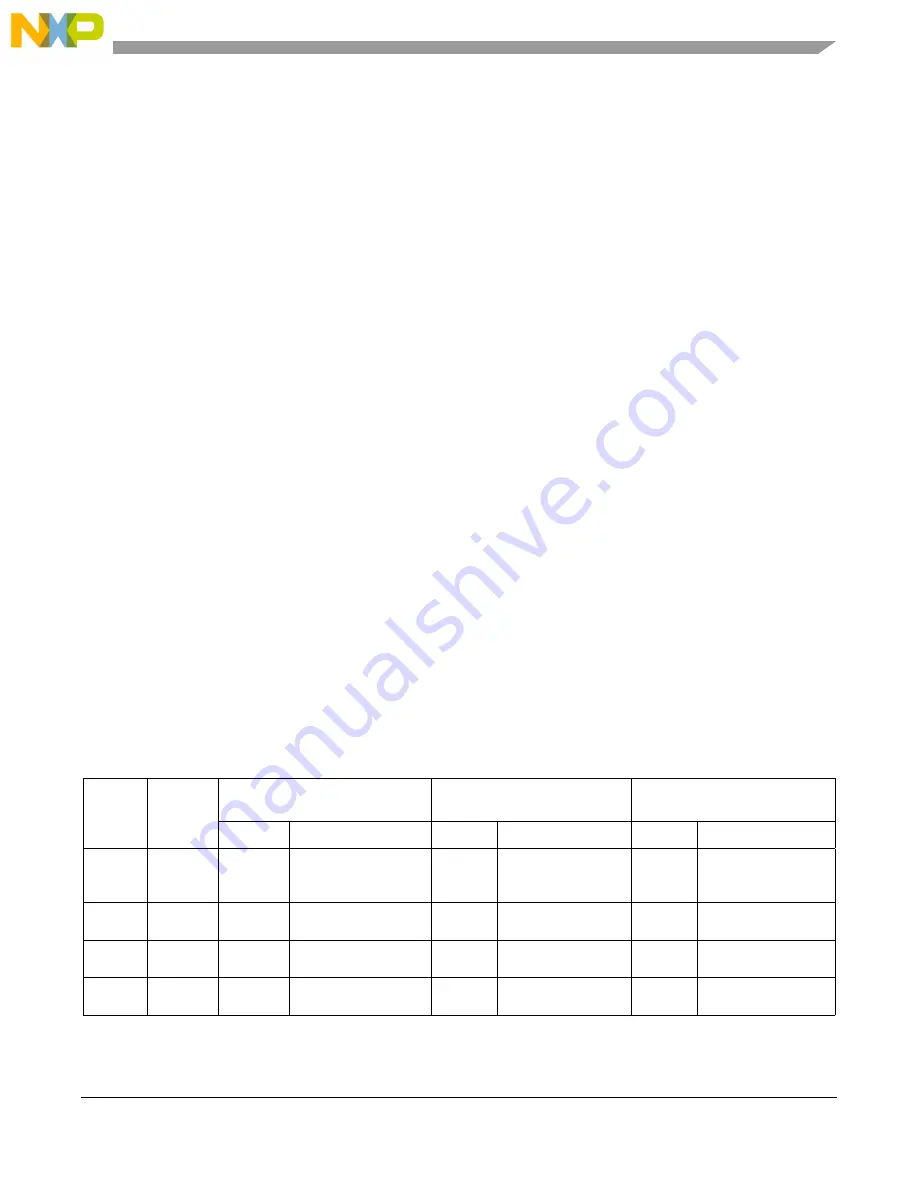
The SCI and CAN controllers pins configuration summary is shown in the
Table 9-7. CAN/eSCI Pins Configuration for CAN/eSCI Fixed Baud Rate Boot Modes
Pins
Reset
Function
Initial Serial Boot Mode
Serial Boot Mode after a valid
CAN message received
Serial Boot Mode after a valid
eSCI message received
Function
Pad Configuration
Function
Pad Configuration
Function
Pad Configuration
CNTX_A
GPIO
CNTX_A
Push/Pull output, with
medium slew rate
CNTX_A
Push/Pull output,
with medium slew
rate
GPIO
—
CNRX_A
GPIO
CNRX_A
Input with pull-up and
hysteresis
CNRX_A
Input with pull-up
and hysteresis
GPIO
—
TXD_A
GPIO
GPIO
—
GPIO
—
TXD_A
Push/Pull output, with
medium slew rate
RXD_A
GPIO
RXD_A
Input with pull-up and
hysteresis
GPIO
—
RXD_A
Input with pull-up and
hysteresis
Summary of Contents for PXR4030
Page 1: ...PXR40 Microcontroller Reference Manual Devices Supported PXR4030 PXR4040 PXR40RM Rev 1 06 2011...
Page 30: ...PXR40 Microcontroller Reference Manual Rev 1 Freescale Semiconductor xxx...
Page 40: ...PXR40 Microcontroller Reference Manual Rev 1 xl Freescale Semiconductor...
Page 66: ...Memory Map PXR40 Microcontroller Reference Manual Rev 1 2 4 Freescale Semiconductor...
Page 120: ...Signal Descriptions 3 54 Freescale Semiconductor PXR40 Microcontroller Reference Manual Rev 1...
Page 860: ...FlexCAN Module 24 50 Freescale Semiconductor PXR40 Microcontroller Reference Manual Rev 1...
Page 1167: ...Decimation Filter Freescale Semiconductor 28 53 PXR40 Microcontroller Reference Manual Rev 1...
Page 1168: ...Decimation Filter 28 54 Freescale Semiconductor PXR40 Microcontroller Reference Manual Rev 1...







































































