



















MobileRobots Inc.
Start:Run
dialog. Notice that ARCOScf automatically engages the SH2 microcontroller’s Maintenance
Mode.
Step 5: Changing Arm Configuration Parameters
Normally when it starts, your robot-FLASH configuration program automatically retrieves the current
identifying and operating parameters from your robot’s controller. Use the ‘
a
’ or
arm
keyword to see a
list of the working values. Thereafter, type the listed keyword alone to review its individual value, or
type the keyword and give a new value to change the FLASH parameter.
While working, you change a temporary copy of the FLASH parameters in your PC’s memory. Your
changes are not committed to your robot’s FLASH memory until you choose to explicitly "
save
" them.
Step 6: Save Your Work
Use the
save
command to save configuration changes to your robot’s FLASH. If you don’t save your
changes to FLASH, they won’t take effect.
We also strongly recommend that you save your work to disk, as well, for later retrieval should your
controller get damaged or it’s FLASH inadvertently erased. To save your current configuration to a disk
file, simply specify a path and filename with the save command. For example:
> save myP3DX
copies the changes you’ve made on the PC to a disk file. Be careful: this does not download the
changes to your robot’s FLASH. Use
save
alone to do that.
Use the
restore
command to not only retrieve the current operating parameters from the robot, but
to load a saved parameters files from disk.
You may edit the file-restored parameters just as you edit those retrieved from the robot. And you may
save those edited parameters over the same file or a different one, using the
save
command. Note
that file-restored configuration parameters are not necessarily the same as those stored in the robot's
FLASH. You must
save
them there separately. Default parameter files come with each distribution,
but it is tedious to reconstruct an individual robot’s unique configuration, particularly the unique Arm
values.
Editing the Arm Parameters
To view the list of current FLASH values for your Pioneer Arm, type
'
a
'
or “arm”, followed by a return
(
Enter
). Type '
?
' or
'
help
'
to see a list of
p2oscf
commands.
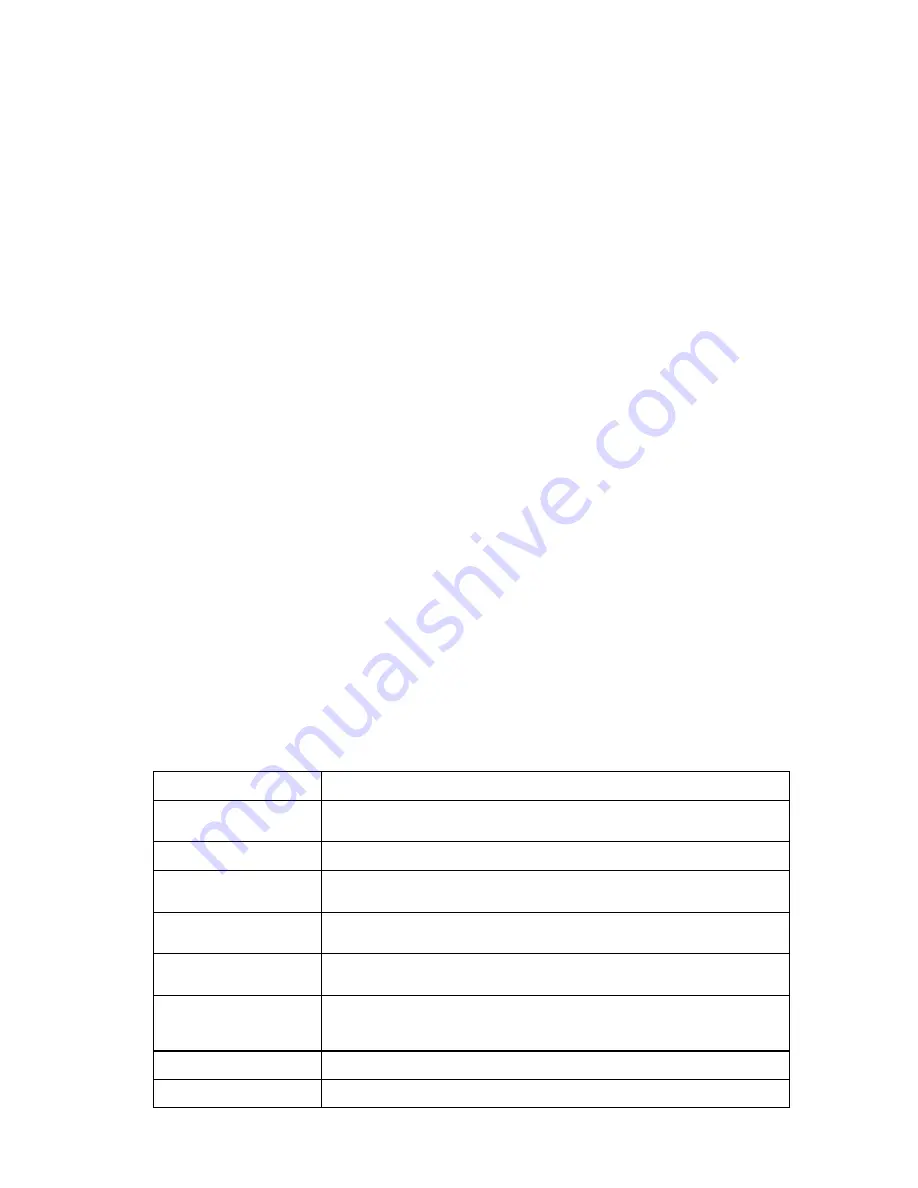
Table 6. Configuration commands
19
C
OMMAND
D
ESCRIPTION
keyword
<value>
Alone, keyword displays current, edited value. Add value
argument to change current value.
c or constants
Display constant values (P2OS only)
v or variables
Display current, edited operational values; may be different
than values currently stored in FLASH.
a or arm
Display current, edited FLASH-embedded values for control of
the Pioneer Arm accessory.
r or restore
<pathname>
Restores edited variables to values currently stored in FLASH
or from file, if pathname argument included.
save <pathname>
Saves current edited values to FLASH and exits program or
saves current edited values to disk for later reference and
continues in editor.
q or quit
Exits without saving any changes to flash.
? or help
Displays commands and descriptions.







































































