





























Moog ACV with CANopen bus interface
6 Signal routing and scaling
Drive transducer interface
B99224-DV018-D-211, Rev. A, October 2018
80
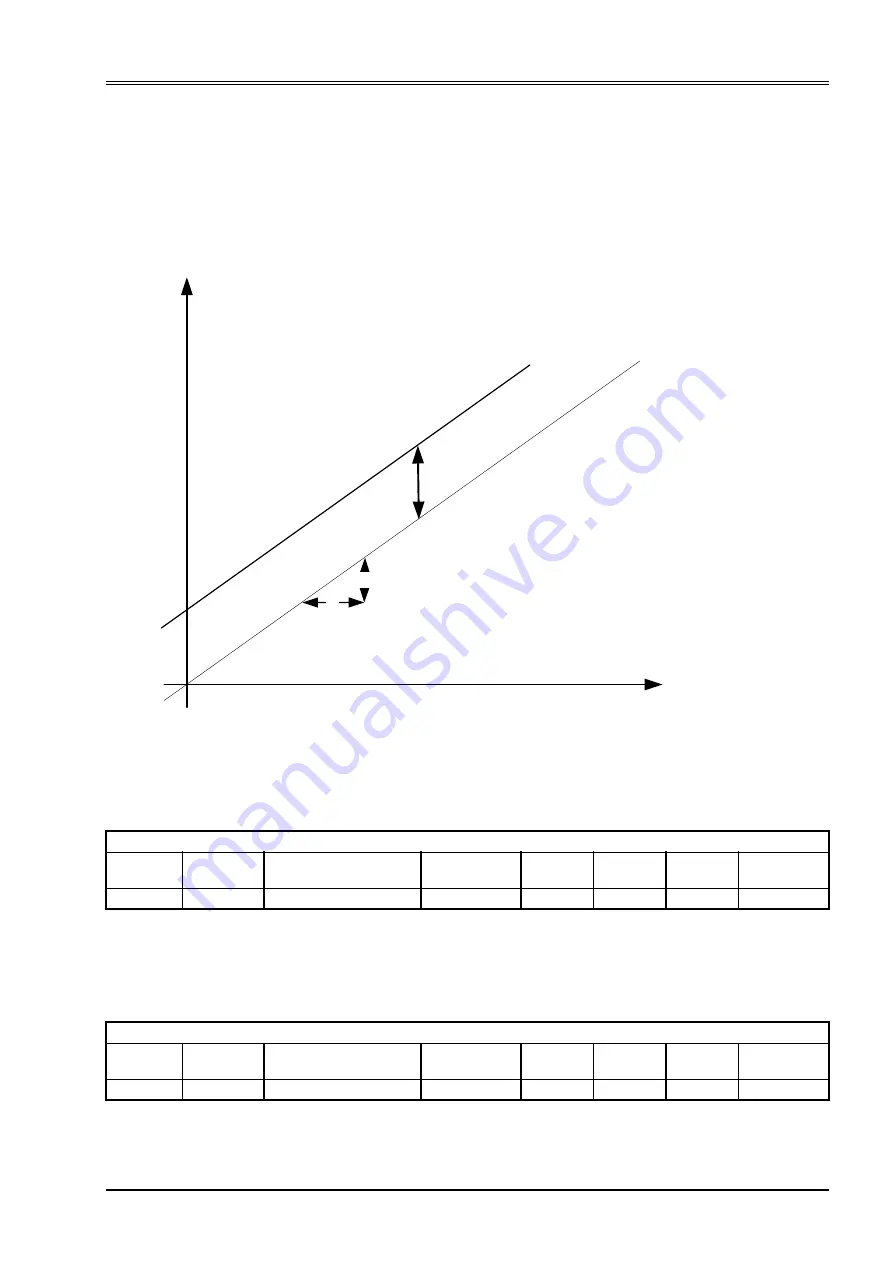
6.3.11 Position digital encoder actual value scaling
To activate the position digital encoder actual value scaling, the interface type needs to be configured to
"position direct 16 bit","position direct 32 bit","position incremental", "position SSI binary" or "position SSI
gray". This is done by writing the value –2, –1, 64, 65 or 66 to the parameter <Type> (0x6202).
This parameter setting is effective for the interface selected by <InterfaceNumber> (0x6201).
Chapter "6.3.9.3 Object 0x6202: Type", page 76
Figure 31: Position digital encoder actual value scaling
6.3.11.1 Object 0x6240: Position resolution
This parameter defines the transducer siganl when the position is maximal.
6.3.11.2 Object 0x6241: Position offset
This parameter defines a position offset which is added to the two point scaling function defined by the four
parameters before.
x (input from the Transducer Port)
y(x) = <ActualValue> (0x6204)
dx
dy
<PositionOffset> (0x6241)
y x
( )
x <PositionOffset> (0x6241)
+
(
)
<PositionResolution> (0x6240)
⋅
=
<PositionResolution> (0x6240)
dy
dx
------
=
Drive_ActualValueConditioning
Index
Sub-index
Parameter name
Data type
Access
Per-
sistence
Value
range
Default
0x6240
1
PositionResolution
INT32
rw
N
INT32
1
Drive_ActualValueConditioning
Index
Sub-index
Parameter name
Data type
Access
Per-
sistence
Value
range
Default
0x6241
1
PositionOffset
INT32
rw
N
INT32
0







































































