




























Moog ACV with CANopen bus interface
6 Signal routing and scaling
Local CAN
B99224-DV018-D-211, Rev. A, October 2018
105
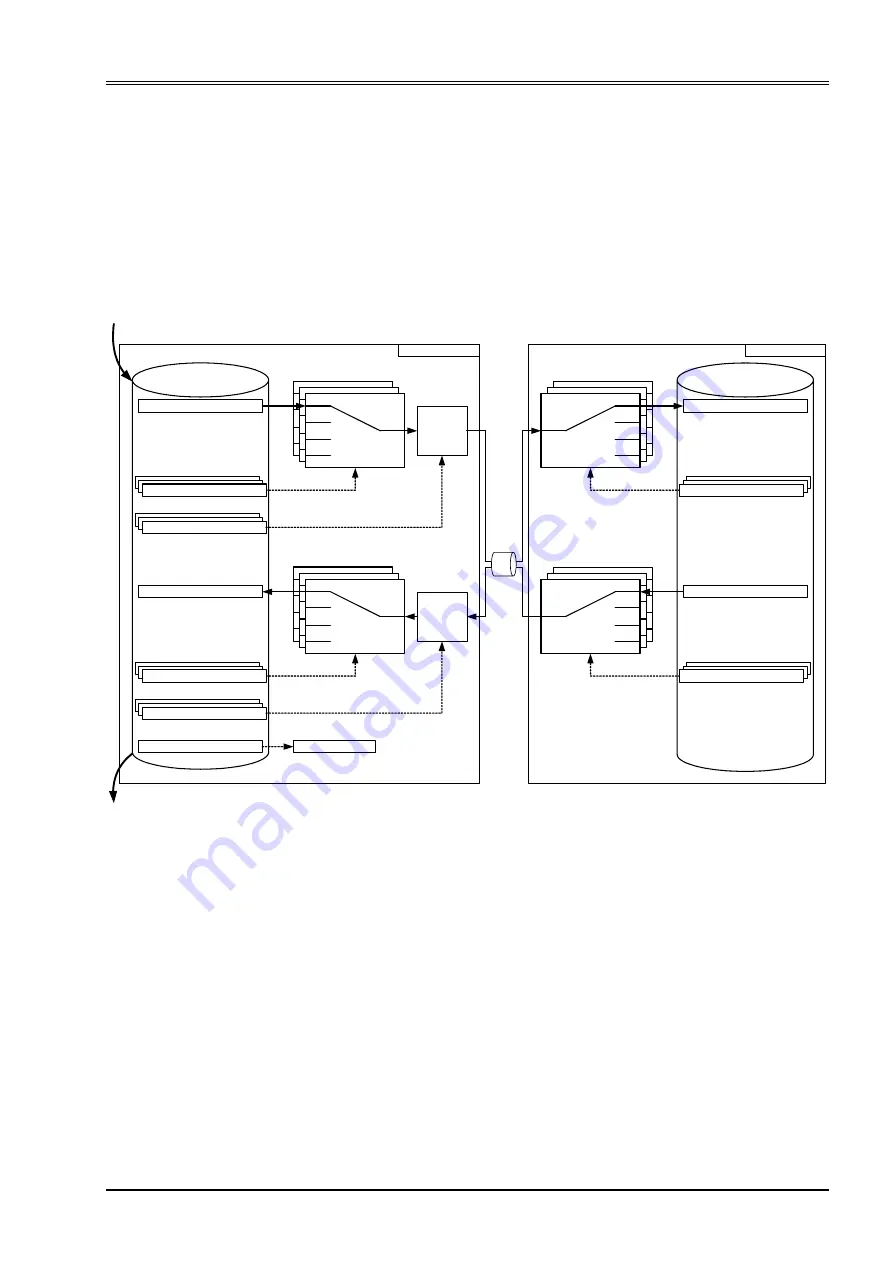
6.9.2 Local CAN process data object (PDO)
The process data object (PDO) communication allows sending and receiving parameters in real time. Differ-
ent transmission modes are available: synchronous or event or timer driven transmission.
Four transmit and four receive PDOs are implemented:
• Receive process data object (RxPDO) protocol
Chapter "6.9.3 Receive process data object (RxPDO) configuration", page 106
• Transmit process data object (TxPDO) protocol
Chapter "6.9.4 Transmit process data object (TxPDO) configuration", page 112
Figure 41: Local CAN process data object (PDO) configuration
0815
<INTEGER32_1> (0x290D)
Local CAN
RxPDO Mapping (0x5600...0x5603)
0815
<PositionValue> (0x6004)
External CAN
Device TxPDO Mapping
0815
<INTEGER32_2> (0x290D)
Local CAN
RxPDO Mapping (0x5A00...0x5A03)
0815
<?> (0x????)
External CAN
Device TxPDO Mapping
Local CAN
TxPDO configuration (0x5800...0x5803)
Local CAN
RxPDO configuration (0x5400...0x5403)
Local CAN
RxPDO
protocol
Local CAN
TxPDO
protocol
Servo valve
External CAN device
127
<ModuleIdentifier> (0x5B00)
Object Dictionary (OD) /
Parameter
Object Dictionary (OD) /
Parameter
Field bus
Field bus
CAN
4 TxPDO channels with
8 mappable parameters
4 RxPDO channels with
8 mappable parameters
4 RxPDO channels with
8 mappable parameters
4 TxPDO channels with
8 mappable parameters
0x????0020
0x290D0120
0x60040020
0x290D0220
0x...
0x...
0x...
0x...
0x...
0x...
0x...
0x...
0x...
0x...
0x...
0x...
0x...
Local node identifier
Local node identifier
Remote node identifier
1 …
32
1 …
32
32
…
1
32
…
1







































































