



























Moog ACV with CANopen bus interface
6 Signal routing and scaling
Local CAN
B99224-DV018-D-211, Rev. A, October 2018
119
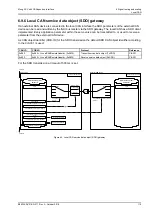
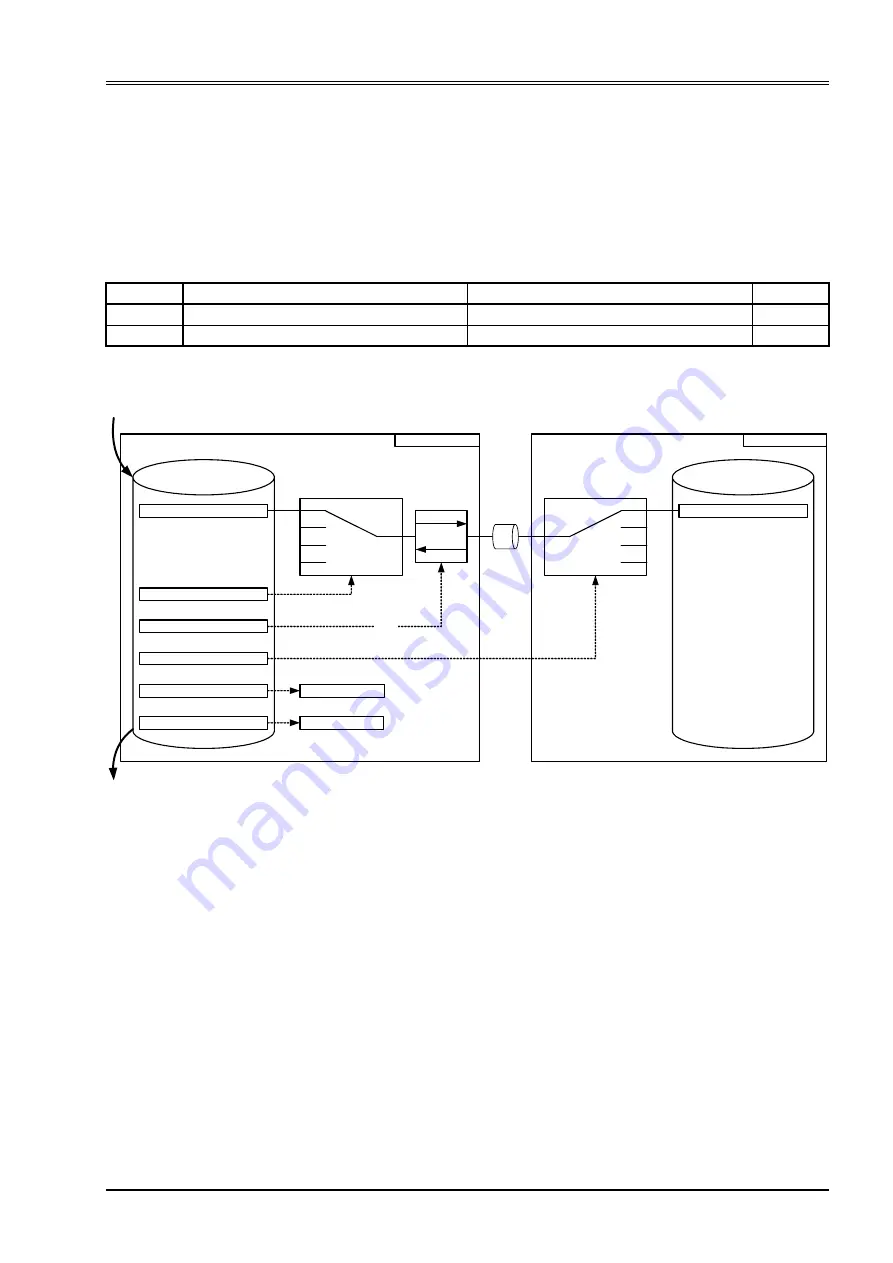
6.9.6 Local CAN service data object (SDO) gateway
If an external CAN device is connected to the local CAN interface the SDO parameters of the external CAN
device can be read and written by the field bus master via the SDO gateway. The local CAN has a SDO client
implemented. Every application parameter within the servo valve can be transmitted to, or used to receive a
parameter from the external CAN device.
As CAN object identifier (COB-ID) for the SDO transmission the default SDO CAN object identifier according
to the CiA 301 is used:
For the SDO transmission a timeout of 500 ms is set.
Figure 44: Local CAN service data object (SDO) gateway
CAN-ID
COB-ID
Protocol
Reference
0x580
0x580 + <LocalCANRemoteNodeId> (0x5B12)
Transmit service data object (TxSDO)
CiA 301
0x600
0x600 + <LocalCANRemoteNodeId> (0x5B12)
Receive service data object (RxSDO)
CiA 301
0815
0x290C0020
<INTEGER32_1> (0x290D)
<LocalCANRemoteParameter> (0x5B10)
0x290D0020
1
<LocalCANRemoteTransmition> (0x5B13)
0x65090020
<LocalCANRemoteParameterAdress>
(0x5B11)
<LocalCANRemoteParameterAdress>
(0x5B11)
0815
<Offset> (0x6509)
SDO protocol
triggers
<LocalCANRemoteParameter>
(0x5B10)
External CAN device
Servo valve
127
<LocalCANModuleIdentifier> (0x5B00)
1
<LocalCANRemoteNodeId> (0x5B12)
Local node identifier
Remote node identifier
0x65090020
1 (download)
2 (upload)
0x...
0x...
0x...
0x...
0x...
0x...
Field bus
Field bus
Object Dictionary (OD) /
Parameter
Object Dictionary (OD) /
Parameter
Local node identifier
Remote node identifier
CAN







































































