




























Moog ACV with CANopen bus interface
7 Servo valve functions
Axis position controller
B99224-DV018-D-211, Rev. A, October 2018
200
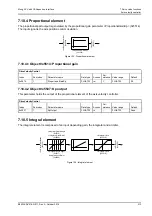
7.8.15 Axis position synchronisation
This function allows the synchronisation of the actual position with the actual position of up to four external
axis. For example: synchronise the pitch of one wing of a windmill with the pitch of the two other wings.
Figure 103: Axis position synchronisation
7.8.15.1 Object 0x5829: Synchronisation gain
This parameter holds the gain of the proportional element of the axis position synchronisation. Zero will switch
off the synchronous function.
7.8.15.2 Object 0x5830: Number of axis to synchronize
This parameter holds the number of axis which should be synchronous.
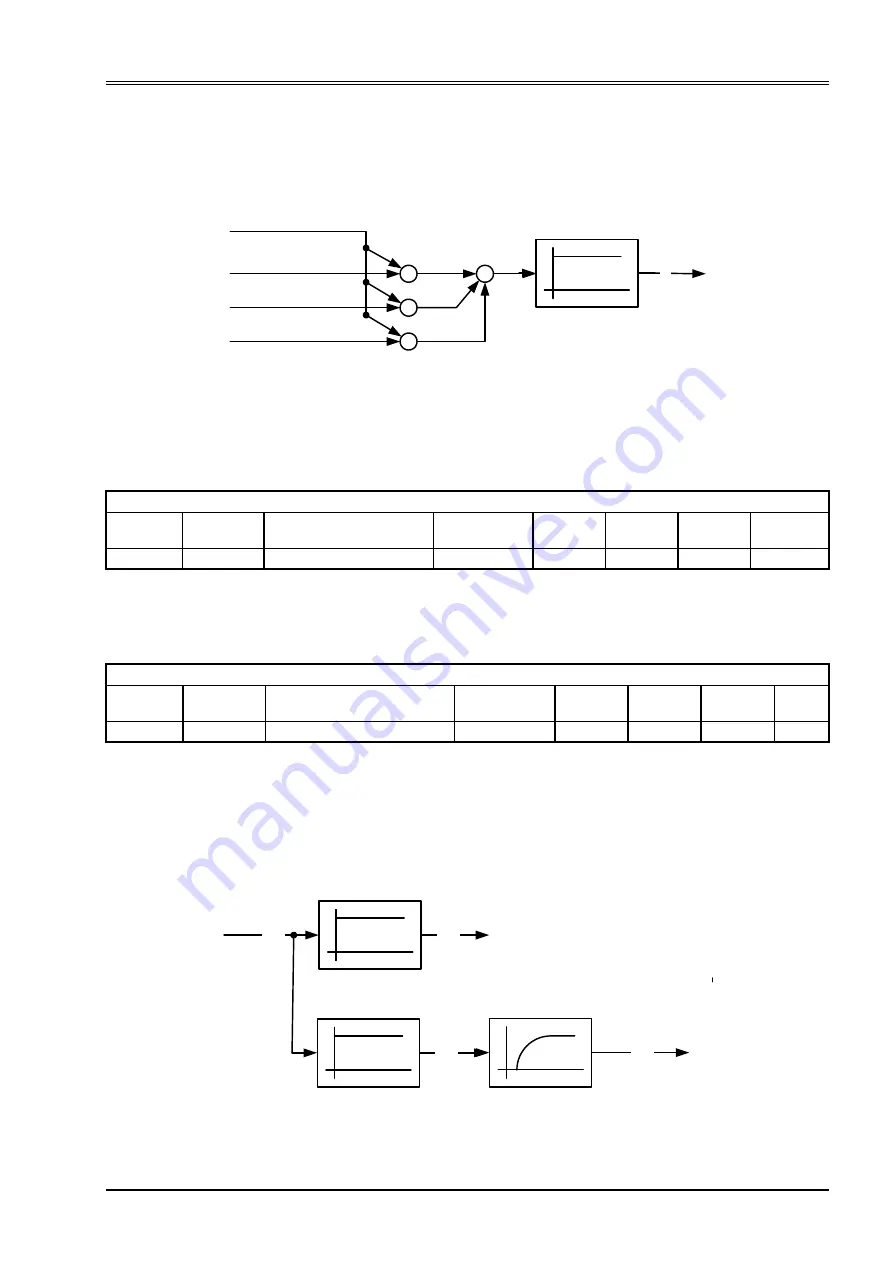
7.8.16 Proportional element with first order lag element
The proportional part output is generated by the proportional gain parameter <ProportionalGainKp> (0x5501)
plus the first order lag element with the gain <ProportionalGainKpT1> (0x5501) and the time constant
<TimeConstantKpT> (0x5508). The input signal is the axis position control deviation.
Figure 104: Proportional element with first order lag element
<PosSynchronisationGain>
(0x5829)
#S
yn
ch
ro
ni
sa
tion#
-
-
-
<PosActualValue2>
(0x6601)
<PosActualValue1>
(0x6601)
<PosActualValue3>
(0x6601)
<PosActualValue4>
(0x6601)
DrivePositionControl
Index
Sub-index
Parameter name
Data type
Access
Per-
sistence
Value
range
Default
0x5829
0
PosSynchronisationGain
FLOAT32
rw
Y
FLOAT32
0.0
DrivePositionControl
Index
Sub-index
Parameter name
Data type
Access
Per-
sistence
Value
range
Default
0x5830
0
NumberOfAxisToSynchronize
INT8
rw
Y
1…4
3
<ProportionalGainKp>
(0x5501)
<
P
os
C
on
tr
ol
D
evi
at
io
n>
(0x6
650
)
<
K
pOut
pu
t>
(0x
552
A)
<TimeConstantKpT>
(0x5508)
<
K
pT1
O
ut
put
>
(0
x55
2A)
<ProportionalGainKpT1>
(0x5501)
<KpT1
O
ut
put
>
(0
x55
01)







































































