




























Moog ACV with CANopen bus interface
7 Servo valve functions
Axis position controller
B99224-DV018-D-211, Rev. A, October 2018
203
7.8.18.2 Object 0x5503: Differentiator T1
This parameter contains the time constant of the first differentiator in seconds.
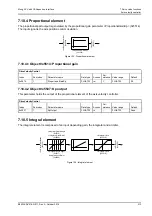
7.8.19 Axis velocity feed forward proportional element
To realize a feed forward control for the velocity, the axis velocity demand value will be multiplied with this
gain and added to the other parts of the controller.
Figure 107: Axis velocity feed forward proportional element
7.8.19.1 Object 0x5506: Velocity feed forward proportional gain
This parameter contains the velocity feed forward gain.
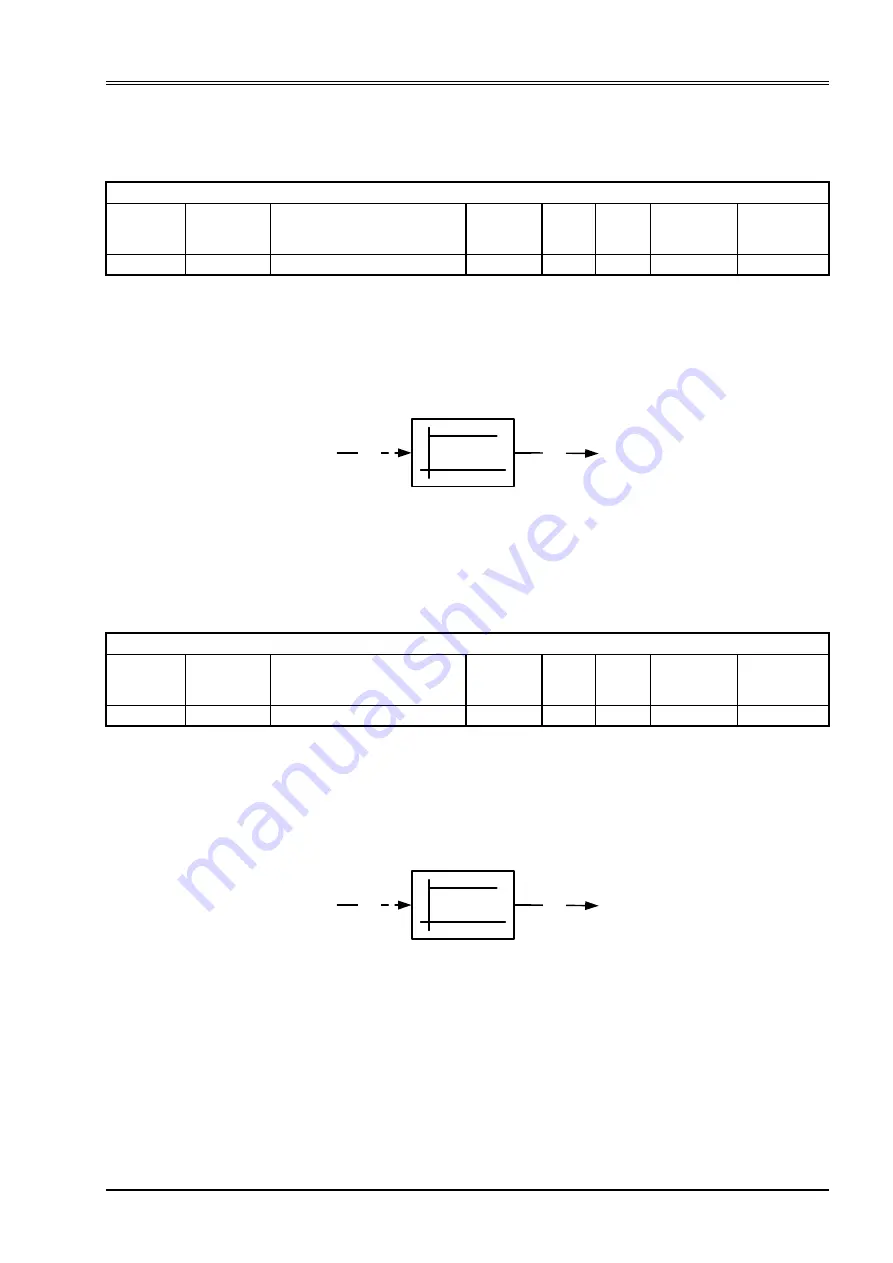
7.8.20 Axis acceleration feed forward proportional element
To realize a feed forward control for the acceleration, the axis acceleration demand value will be multiplied
with this gain and added to the other parts of the controller.
Figure 108: Axis acceleration feed forward proportional element
DrivePositionControl
Index
Sub-index
Parameter name
Data type
Access
Per-
sis-
tence
Value range
Default
0x5503
1
DifferentiatorT1
FLOAT32
rw
Y
0…+inf
0.0
<ProportionalGainKv>
(0x5506)
<
P
os
C
ont
ro
lD
ev
ia
tio
n
>
(0
x6
6
50
)
<
V
el
F
e
ed
Fo
rw
a
rd
O
utp
ut>
(0
x5
5
2E)
DrivePositionControl
Index
Sub-index
Parameter name
Data type
Access
Per-
sis-
tence
Value range
Default
0x5506
1
ProportionalGainKv
FLOAT32
rw
Y
FLOAT32
0.0
<ProportionalGainKa>
(0x5507)
<
P
os
AccD
e
m
a
m
dVa
lue>
(0
x5
61
6)
<
A
cc
FeedF
o
rw
ar
dOu
tp
ut>
(0
x5
5
2F)







































































