





























4.3. Force and torque script functions
Force Torque Sensor functions are made available in the Script drop-down menu.
l
The rq_zero_sensor() function can be called at any point in a robot program to zero the force and torque values of the Force
Torque Sensor.
l
The get_sensor_Fx(), get_sensor_Fy(), get_sensor_Fz(), get_sensor_Mx(), get_sensor_My(), get_sensor_Mz() functions allow the
user to assign the sensor values to any variable.
l
The get_applied_tcp_force(<index>) function returns the current wrench (force and torque vector) value currently applied at the
tool center point (TCP).
l
The get_applied_base_force(<index>) function returns the current wrench (force and torque vector) value applied at the robot
arm base.
l
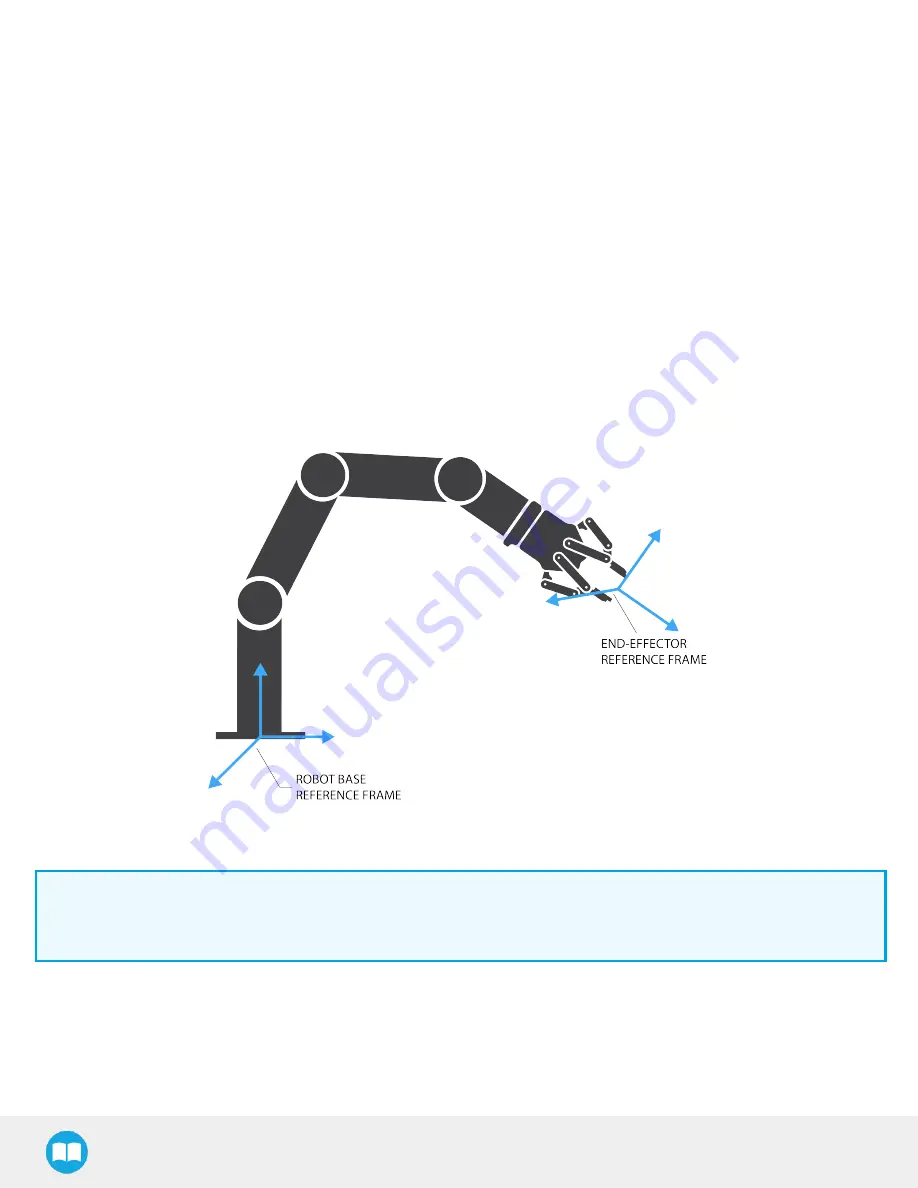
The express_force_in_frame(<T_from_to>,<wrench_from>)function is used to convert the wrench (force and torque vector) read-
ing in a given reference frame into another (end-effector to robot base, and vice-versa, for example).
l
T_from_to = relative pose of the reference frame into which the wrench reading is converted
l
wrench_from = wrench to transform in pose or list format (Fx, Fy, Fz, Mx, My, Mz)
Fig. 4-5: Example of two reference frames for the express_force_in_frame (<T_from_to>, <wrench_from>) function
Info
Although displayed in real time in the Variables tab, the force and torque values can be seen in the Finishing Copilot
Dashboard. Note that the force and torque values, in the Installation tab, are those of the tool flange.
4.4. ActiveDrive Toolbar
The ActiveDrive Toolbar is automatically installed with the Finishing Copilot software package. It enhances the guiding mode on
Universal Robots by allowing the robot to be hand-guided smoothly and easily towards a waypoint. The ActiveDrive feature is a
great way to assist the Path recording described in the Path Recording node section, by hand-guiding the robot while recording a
path.
31







































































