





























15
Figure 11. DX computer control side
panel
For a piggyback laptop or the embedded PC, the serial connection is via a common “pass-through” RS-232 serial cable.
We
also offer a wireless Ethernet-to-serial bridge accessory which connects directly to your robot’s microcontroller. It
works by automatically translating network-based Ethernet packet communications into streaming serial for the robot
microcontroller and back again.
Running your robot through wireless Ethernet to an onboard computer is different than with the Ethernet-to-serial
bridge device. In the first case, you run your robot client software on the onboard PC and use wireless Ethernet to
monitor and control that PC’s operation. In the latter case, you run the client software on a remote PC.
Accordingly, a major disadvantage of the wireless Ethernet-to-serial device is that it requires a consistent wireless
connection with the robot. Disruption of the radio signal—a common occurrence in even the most modern
installations—leads to poor robot performance and very short ranges of operation.
This is why we recommend onboard client PCs for wider, much more robust areas of autonomous operation, particularly
when equipped with their own wireless Ethernet. In this configuration, you run the client software and its interactions
with the robot microcontroller locally and simply rely on the wireless connection to export and operate the client
controls. Moreover, the onboard PC is often needed for local processing, such as to support a laser range finder or to
capture and process live video.
I
NTEGRATED
PC
Mounted just behind the nose of the robot, the Pioneer 3 integrated PC is a common EBX form-factor board that comes
with up to four serial ports, 10/100Base-T Ethernet, monitor, keyboard and mouse ports, USB ports and a hard-disk.
For additional functionality, such as video framegrabber, Firewire or wireless Ethernet interfaces, the onboard PC
accepts PC104 and PC104-plus PCI interface cards that stack on the motherboard.
Computer power comes from a dedicated DC:DC converter, mounted nearby. The hard-disk drive is mounted to the
robot’s nose, in between a cooling fan and computer speaker.
The onboard PC communicates with the robot’s microcontroller through the
COM1
serial port under Windows or
/dev/ttyS0
on Linux systems. The
microcontroller automatically switches to this connection when software
opens the serial port. Therefore, the
SERIAL
port on the external User
Control Panel can be used for robot control if no software is running on the
onboard computer.
The serial port is also used to indicate some aspects of robot microcontroller
state: DSR (pin 4) is RS-232 high when the microcontroller operates
normally; otherwise it is low when reset or in maintenance mode. Similarly,
RING (pin 9) normally is low and goes RS-232 high when the robot’s
batteries drop below a set (
ShutdownVolts
parameter in ARCOS
configuration, see the ggggenpowerd
enpowerd
enpowerd
enpowerd discussion below).
Computer Control Panel
User-accessible communication and control port connectors, switches and
indicators for the onboard PC are on the Computer Control Panel, found on
the right side panel of the DX or in the hinged control well next to the user
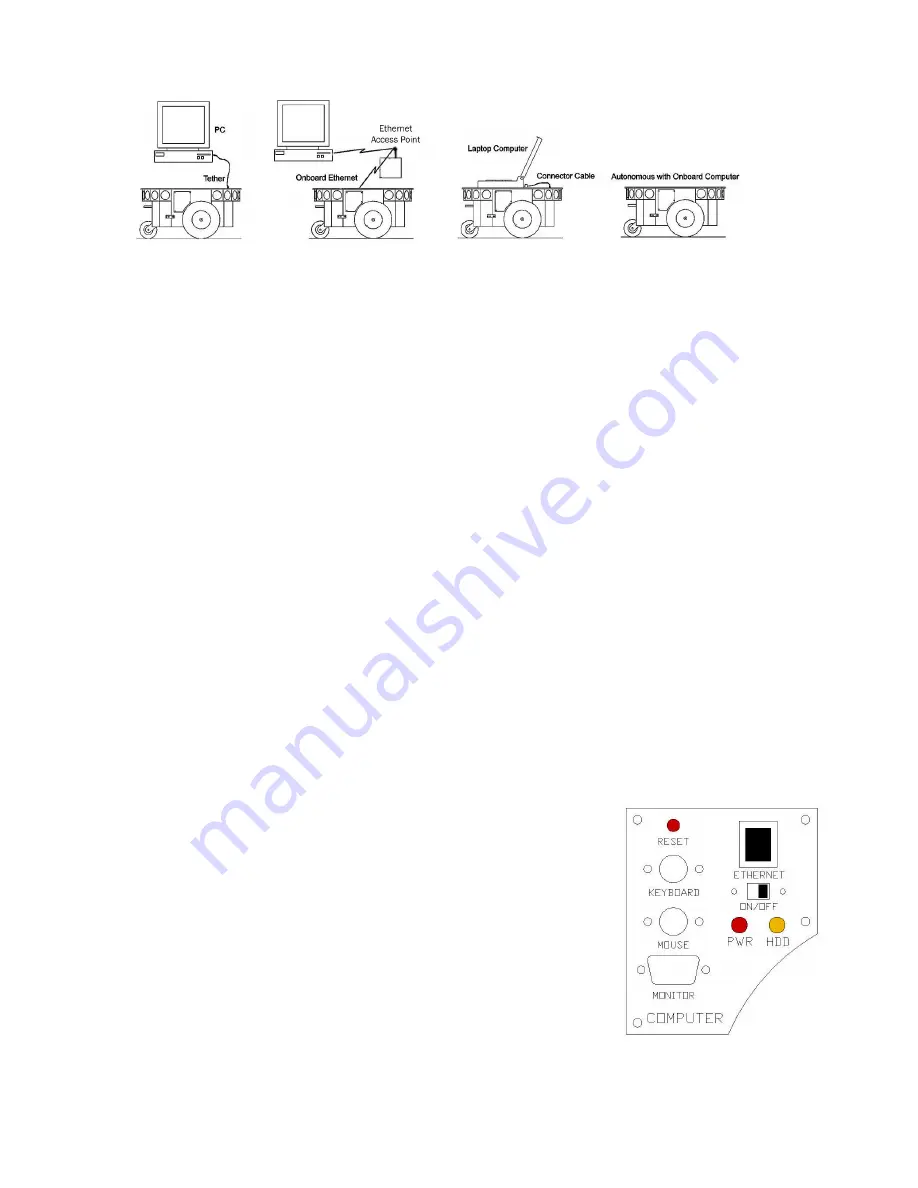
Figure 10. Client-server connection options.







































































