





























21
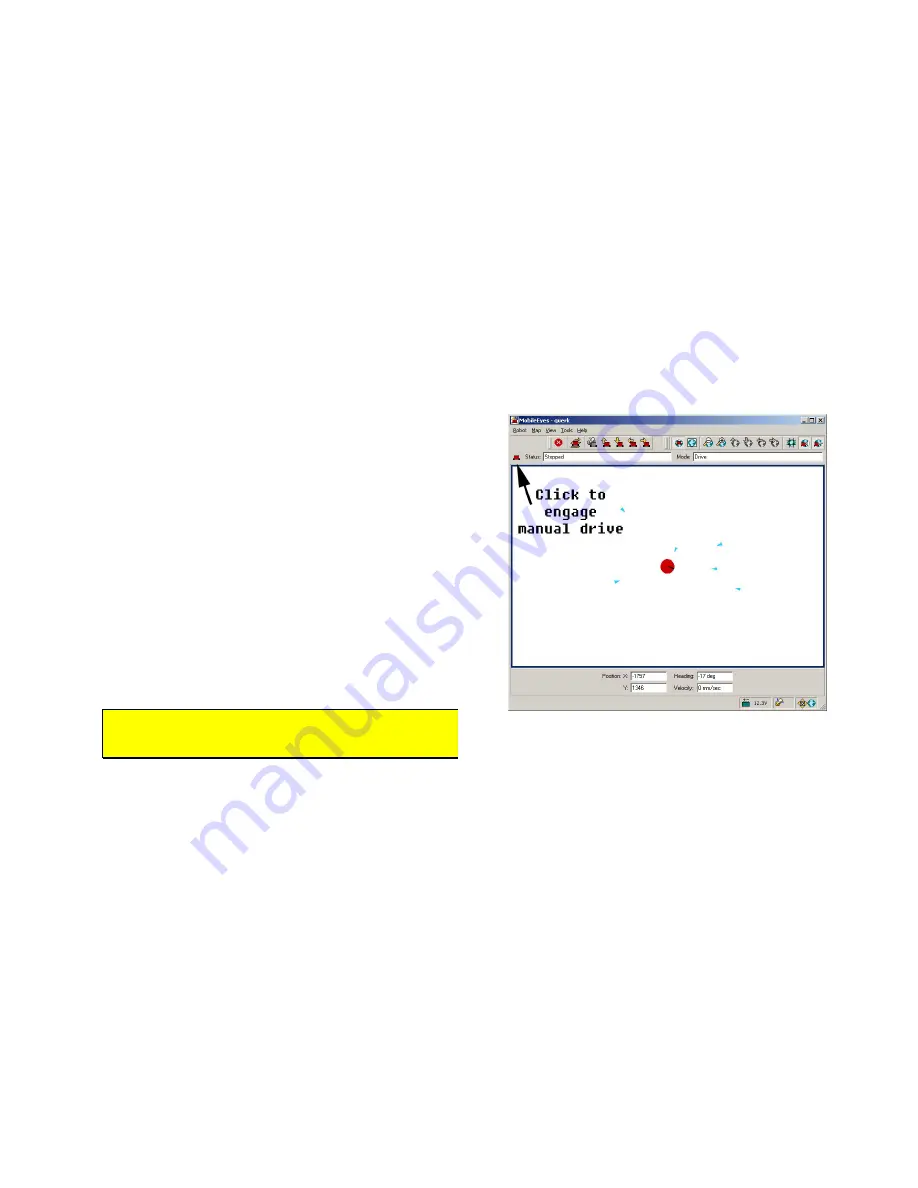
Figure 12. MobileEyes connected to the basic
ArNetworking serverDemo
system.
Access each ARIA demo mode by pressing its related hot-key: ‘
t
’, for instance, to select
teleoperation
. Each mode
includes onscreen instructions and may have sub-menus for operating of the respective device.
D
ISCONNECTING
When you finish, press the
Esc
key to disconnect the ARIA client from your robot server and exit the ARIA demonstration
program. Your robot should disengage its drive motors and stop moving, and its SONAR should stop firing. You may
now slide the robot’s
Main Power
switch to
OFF
.
N
ETWORKING WITH
M
OBILE
E
YES
To use the MobileEyes GUI client for much more advanced, network-based robotics control, you need to do things a bit
differently. You need the Ethernet-to-serial device or a PC on the robot. But instead of ARIA
demo
, use ArNetworking’s
serverDemo
to mediate communications between MobileEyes and your robot over the network.
Start serverDemo
The ArNetworking client,
serverDemo
, works to
mediate communications between your Adept
MobileRobots platform over the network and remote
clients, such as the GUI MobileEyes. To examine its
inner workings, look at
serverDemo.cpp
(and others)
sources
in
the
ArNetworking/examples
subdirectory.
Start
serverDemo
just like
demo
, with the
–
remoteHost
argument if you aren’t running the
software onboard. ServerDemo also accepts the
special command-line argument –connectLaser if you
have a SICK LMS rangefinder attached to the
serverDemo-based PC. ServerDemo can be run
anywhere on the network from which your MobileEyes
and your robot have access, such as on the same PC
as you run MobileEyes.
Connect MobileEyes with serverDemo,
not the robot’s microcontroller.
Start MobileEyes and Connect with serverDemo
From Windows, simply double-click the MobileEyes.exe program normally located in the
C:\Program
Files\MobileRobots\MobileEyes\bin
directory. With Linux, you need to have started X and, from a terminal
session, navigate to the
MobileEyes/bin
directory in
/usr/local
and execute it:
./MobileEyes &
In the MobileEyes startup dialog, enter the hostname or IP address of the PC on which you are running
serverDemo
.
Operating MobileEyes
Simply click the robot icon on the menu bar to engage manual drive and teleoperate the robot. Your robot with
MobileEyes really comes to life when used with SONARNL or ARNL for map-based path-planning and navigation.
Q
UICKSTART
T
ROUBLESHOOTING
Most problems occur when attempting to connect the ARIA or ArNetworking demo program with a robot for the first
time. The process can be daunting if you don’t make the right connections and installations.































































