





























MPC563XM Reference Manual, Rev. 1
134
Freescale Semiconductor
Preliminary—Subject to Change Without Notice
contents of DMAERQ{H,L} to be asserted. Reads of this register return all zeroes. See
and
for the DMASERQ definition.
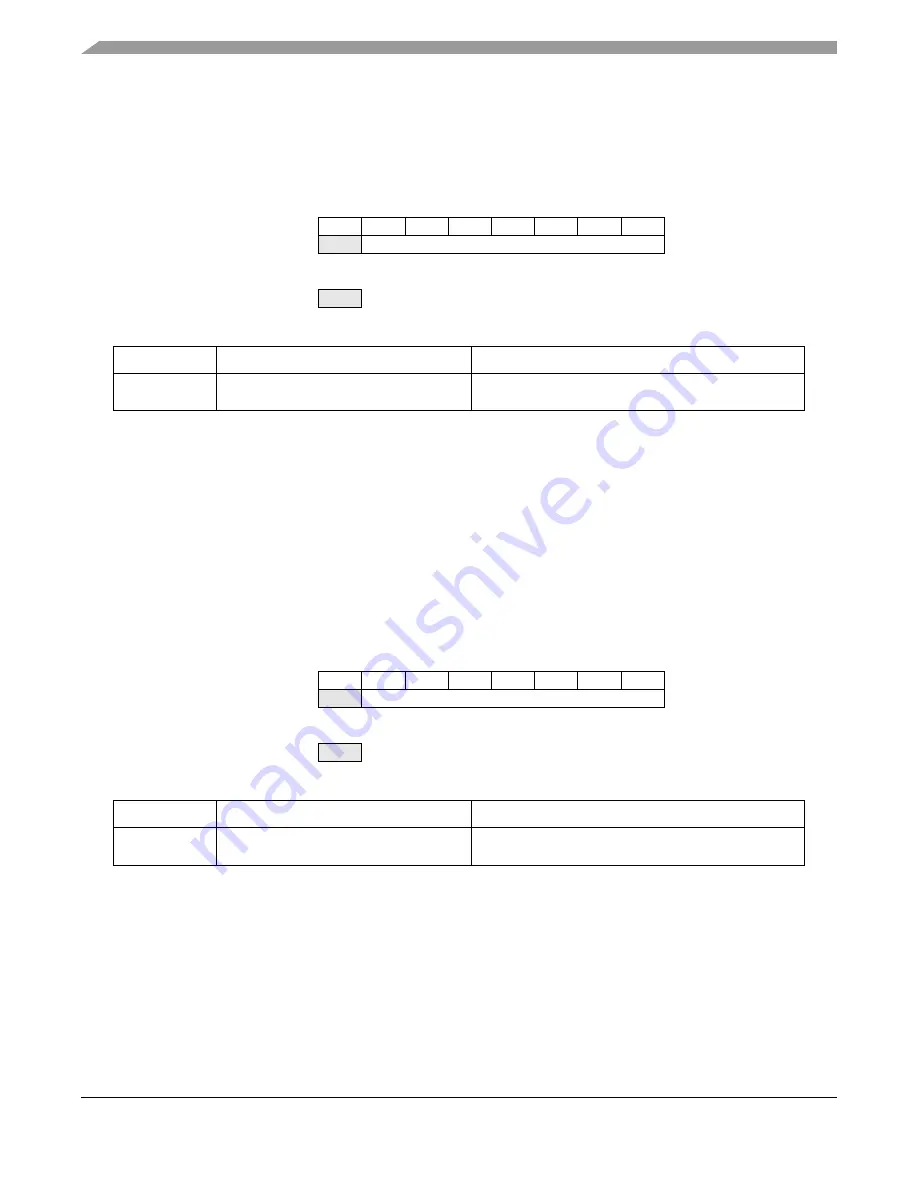
Figure 7-6. DMA Set Enable Request (DMASERQ) Register
Table 7-7. DMA Set Enable Request (DMASERQ) Field Descriptions
7.3.1.6
DMA Clear Enable Request (DMACERQ)
The DMACERQ register provides a simple memory-mapped mechanism to clear a given bit in the
DMAERQ{H,L} registers to disable the DMA request for a given channel. The data value on a register
write causes the corresponding bit in the DMAERQ{H,L} register to be cleared. A data value of 64 to 127
(regardless of the number of implemented channels) provides a global clear function, forcing the entire
contents of the DMAERQ{H,L} to be zeroed, disabling all DMA request inputs. Reads of this register
return all zeroes. See
Figure 7-7. DMA Clear Enable Request (DMACERQ) Register
Table 7-8. DMA Clear Enable Request (DMACERQ) Field Descriptions
7.3.1.7
DMA Set Enable Error Interrupt (DMASEEI)
The DMASEEI register provides a simple memory-mapped mechanism to set a given bit in the
DMAEEI{H,L} registers to enable the error interrupt for a given channel. The data value on a register
write causes the corresponding bit in the DMAEEI{H,L} register to be set. A data value of 64 to 127
(regardless of the number of implemented channels) provides a global set function, forcing the entire
Register address: DMA_ 0x0018
7
6
5
4
3
2
1
0
R
0
0
0
0
0
0
0
0
W
SERQ[6:0]
RESET:
0
0
0
0
0
0
0
= Unimplemented
Name
Description
Value
SERQ[6:0]
Set Enable Request
0-63 Set the corresponding bit in DMAERQ{H,L}
64-127 Set all bits in DMAERQ{H,L}
Register address: DMA_ 0x0019
7
6
5
4
3
2
1
0
R
0
0
0
0
0
0
0
0
W
CERQ[6:0]
RESET:
0
0
0
0
0
0
0
= Unimplemented
Name
Description
Value
CERQ[6:0]
Clear Enable Request
0-63 Clear corresponding bit in DMAERQ{H,L}
64-127 Clear all bits in DMAERQ{H,L}







































































