
























8I20 27
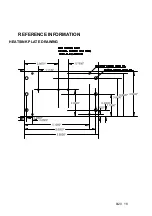
REFERENCE INFORMATION
PARAMETERS
The 8I20 has many user settable parameters, but normally only a very few need be
changed in normal operation The following is a short list of 8I20 parameters for reference
only:
PARAMETER
TYPE
SCALING
FUNCTION
BRAKEOFFV
UINT
10 mV
Set working brake off voltage
NVBRAKEOFFV
UINT
10 mV
Set non-volatile brake off voltage
BRAKEONV
UINT
10 mV
Set working brake on voltage
NVBRAKEONV
UINT
10 mV
Set non-volatile brake on voltage
BUSV
UINT
10 mV
Read motor bus voltage
BUSOVERV
UINT
10 mV
Set working bus overvoltage
threshold
NVBUSOVERV
UINT
10 mV
Set non-volatile bus overvoltage
threshold
BUSUNDERV
UINT
10 mV
Set working bus undervoltage
threshold
NVBUSUNDERV
UINT
10 mV
Set non-volatile bus undervoltage
threshold
MAXCURRENT
UINT
10 mA
Set working full scale current
NVMAXCURRENT UINT
10 mA
Set non-volatile full scale current







































































