





























Moog ACV with CANopen bus interface
6 Signal routing and scaling
Drive transducer interface
B99224-DV018-D-211, Rev. A, October 2018
82
6.3.12.3 Object 0x6230: Minimum interface
This parameter defines the minimum interface signal.
6.3.12.4 Object 0x6231: Maximum interface
This parameter defines the maximum interface signal.
6.3.13 General input scaling
The general input is used to scale an INT32 input or an INT16 input. Example: an external pressure trans-
ducer with CAN interface is mapped to the receive PDO <Integer32> (0x0004). To activate the general input
scaling, the interface type needs to be configured to "general input". This is done by writing the value 5 to the
parameter <Type> (0x6202).
This parameter setting is effective for the interface selected by <InterfaceNumber> (0x6201).
Chapter "6.3.9.3 Object 0x6202: Type", page 76
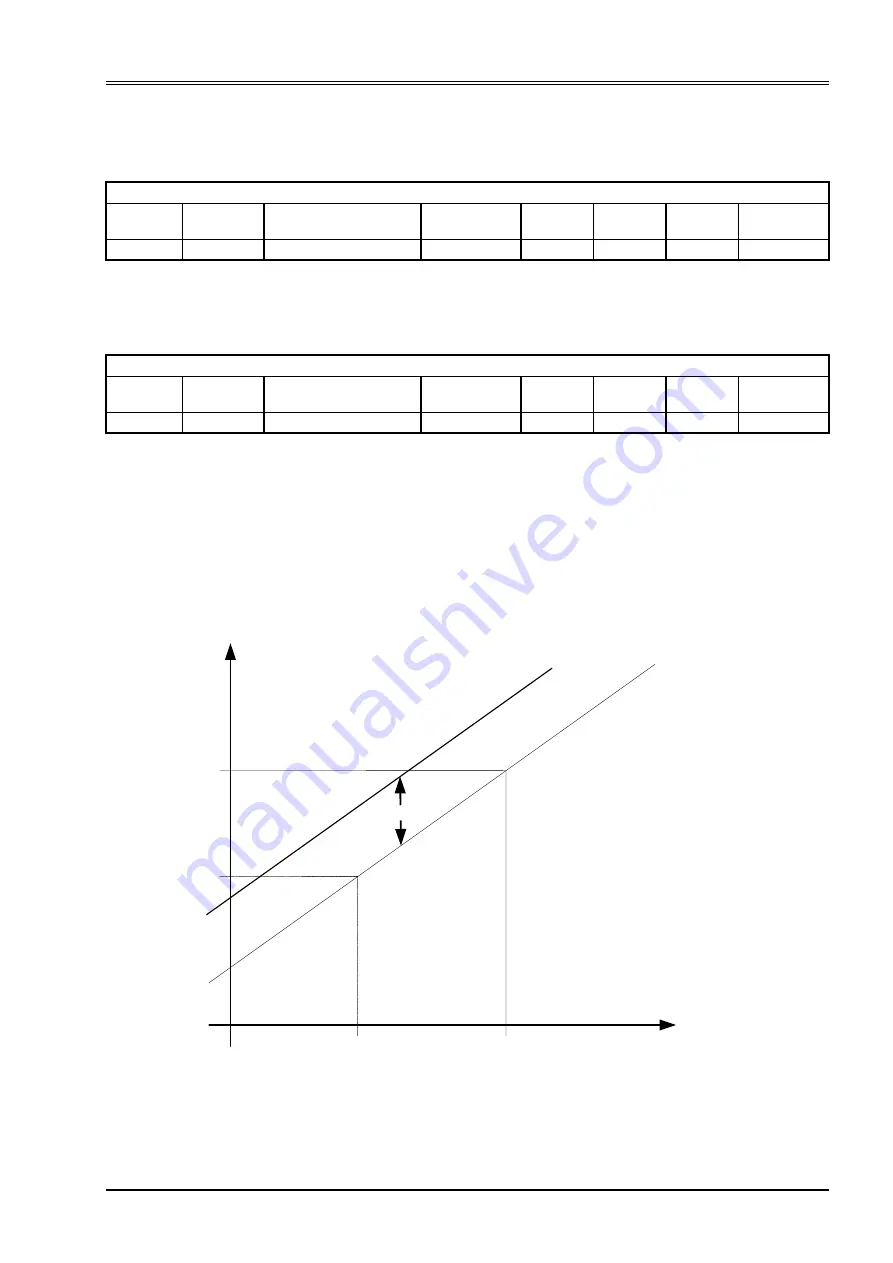
Figure 33: General input scaling
Drive_ActualValueConditioning
Index
Sub-index
Parameter name
Data type
Access
Per-
sistence
Value
range
Default
0x6230
1
MinimumInterface
INT32
rw
N
INT32
–1
Drive_ActualValueConditioning
Index
Sub-index
Parameter name
Data type
Access
Per-
sistence
Value
range
Default
0x6231
1
MinimumInterface
INT32
rw
N
INT32
1
y(x)
(output)
x (input)
y
1
y
2
x
1
x
2
y
off
y(x): <ActualValue> (0x6204)
x1: <GeneralInputSignalMinimum> (0x622C)
x2: <GeneralInputSignalMaximum> (0x622D)
y1: <GeneralInputMinimum> (0x6228)
y2: <GeneralInputMaximum> (0x6229)
yoff: <GeneralInputOffset> (0x622B)
m
y
2
y
1
–
(
)
x
2
x
1
–
(
)
-------------------------
=
y x
( )
m x m x
1
y
1
y
off
+
+
⋅
–
⋅
=







































































