





























Moog ACV with CANopen bus interface
7 Servo valve functions
Axis velocity controller
B99224-DV018-D-211, Rev. A, October 2018
215
7.10.5.5 Object 0x553C: Ki output
This parameter holds the output of the integral element of the axis velocity controller.
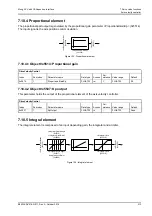
7.10.6 Acceleration feedback
7.10.6.1 Feedback axis velocity value filter
This first order lag element (PT1) is used to filter the axis velocity actual value.
Chapter "7.10.2.2 Object 0x5548: Actual value filter time constant", page 210
Figure 125: Feedback axis velocity value filter
7.10.6.2 Object 0x5549: Velocity feedback filter output
This is the filtered output of the axis velocity actual value.
7.10.6.3 Feedback axis velocity derivative element
Calculation of the axis acceleration actual value by derivation of the axis velocity actual value.
Chapter "7.10.2.4 Object 0x5550: Actual derivative length", page 211
Figure 126: Feedback axis velocity derivative element
DriveVelocityControl
Index
Sub-index
Parameter name
Data type
Access
Per-
sis-
tence
Value range
Default
0x553C
1
KiOutput
FLOAT32
ro
-
FLOAT32
None
<VelActualFilterTimeConstant>
(0x5548)
<V
el
Act
ual
Va
lu
e>
(0
x5
5
44)
<
V
el
F
e
ed
B
ac
kF
ilte
rO
ut
pu
t>
(0
x5
54
9)
DriveVelocityControl
Index
Sub-index
Parameter name
Data type
Access
Per-
sis-
tence
Value range
Default
0x5549
1
VelFeedBackFilterOutput
FLOAT32
ro
-
FLOAT32
None
<
V
el
F
e
ed
B
a
ck
F
ilte
rO
ut
pu
t>
(0
x554
9)
<ProportionalFeedBackGainKa>
(0x5329)
<
A
cc
Feed
Back
Out
put
>
(0
x5
53
9)
<VelActualDerivativeLength>
(0x5550)







































































