























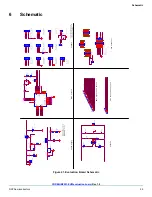

Getting to know the hardware
FRDM-HB2001-EVM evaluation board
, Rev. 1.0
NXP Semiconductors
11
The FRDM-HB2001-EVM, in conjunction with a FRDM-KL25Z board (shipped with the kit), can evaluate the design by means of a GUI,
any MCU with GPIO or with simple lab equipment. A FRDM-KL25Z-compatible GUI and MCU program are available online at the following
link:
The FRDM-HB2001-EVM is compatible with any Arduino™ platform board. However, if a board other than the FRDM-KL25Z is used, MCU
code must be written to work with the board.
3.7
Input signal definitions
The following input signals control the outputs or functions inside the circuit.
3.8
Output signal definitions
The FRDM-HB2001-EVM uses the following output signals to drive a load such as a brushed DC motor. The board provides an analog
output for real time load current monitoring. This signal allows closed loop control of the load.
3.9
Test point definitions
The following test points provide access to various signals to and from the board.
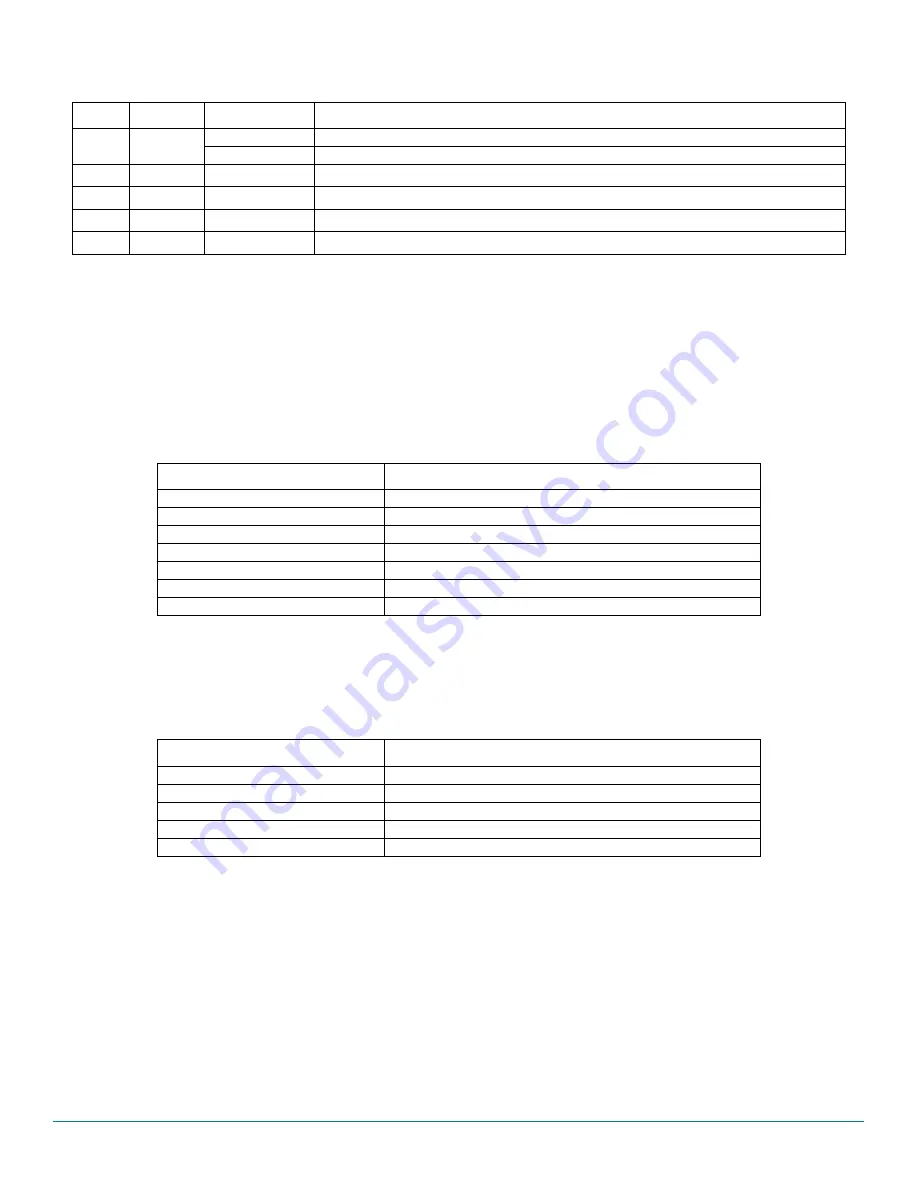
J17
VDD
1–2
V
DD
supply from regulator U2
2–3
V
DD
supply from FRDM board
J18
CFB_R
1–2
CFB connected to MCU ADC input J10 Pin 17 (CFB_READ)
J19
FS_B
1–2
FS_B connected to the pull-up resistor
J26
VDD_REG
1–2
V
DD
to FRDM board
J15
EX_IN
Open
IN1 and IN2 External Inputs
Table 5. Input signal definitions
Input Name
Description
DIS
Disable signal to tri-state the outputs
ENBL
Disable signal to tri-state the output and put the part in Sleep mode
IN1
Logic input to control OUT1
IN2
Logic input to control OUT2
MOSI
Master out slave input for the SPI
CS_B
Chip select bar input for the SPI
SCLK
Clock for the SPI
Table 6. Output signal definitions
Output Name
Description
OUT1
Output 1 of H-Bridge
OUT2
Output 2 of H-Bridge
FS_B
Open drain Active Low status flag output to indicate fault
CFB
Current mirror output for real time load current monitoring
MISO
Master input slave output for SPI
Table 4. Jumper definitions (continued)
Name
Signal
Jumper Position
Connection







































































