


















2
017-
08
16
Safe Position Detection with PCV100-F200-B17-V1D-6011
Software
Calling Up the Program Modules
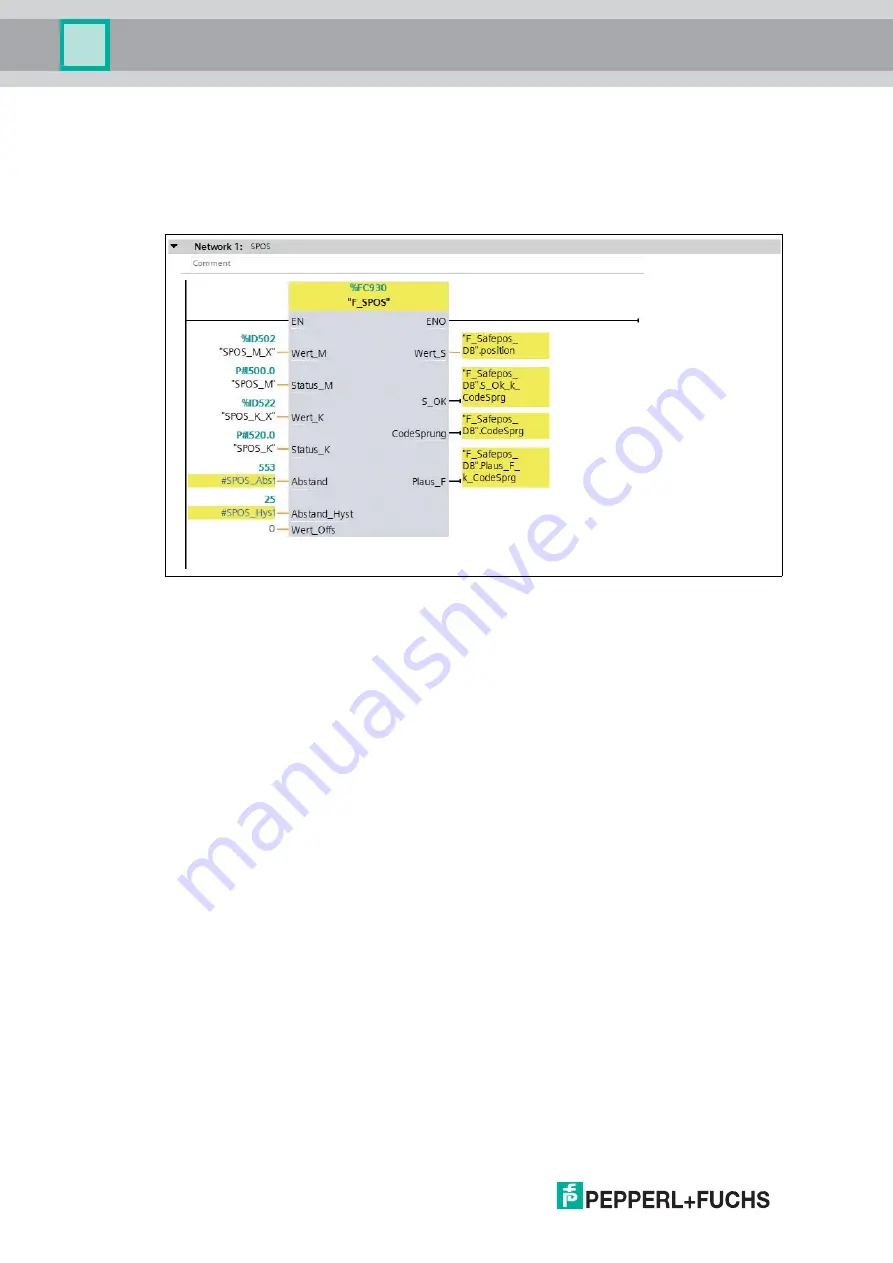
F_SPOS program module: Safe position detection
As an initial step, call up the program module for safe position detection in the safety program
on your control panel.
Figure 4.3
Calling up the F_SPOS component
The parameters for the F_SPOS program module must be configured as follows:
Inputs
Reader distance and hysteresis
In practical terms, the distance is determined from the difference between the two measured
values from the master reader and control reader. The Abstand_Hyst hysteresis is the
compensation needed in case the readers move mechanically, e.g. in curves.
Wert_Offs position offset
The Wert_Offs position offset is only to be considered as such; only one value is used in the
user program. The reference point for the means of transport is somewhere on the mounting
point and allows accurate "calibration" up to +/- 10 mm.
Wert_M
DINT
Position value of the master reader
Status_M
UDT_PF_SPOS_
STATUS
Status of the master reader as UDT at the hardware
address for the status
Wert_K
DINT
Position value of the control reader
Status_K
UDT_PF_SPOS_
STATUS
Status of the control reader as UDT at the hardware
address for the status
Abstand
DINT
Mechanical distance between the master reader and
control reader in mm (max. 5000 mm)
Abstand_Hyst
DINT
Permissible tolerance of the reader distance in mm
(max. 30 mm)
Wert_Offs
DINT
Offset for the position output value; for compensating
mechanical differences in mm (max. +/- 10 mm)







































































