




















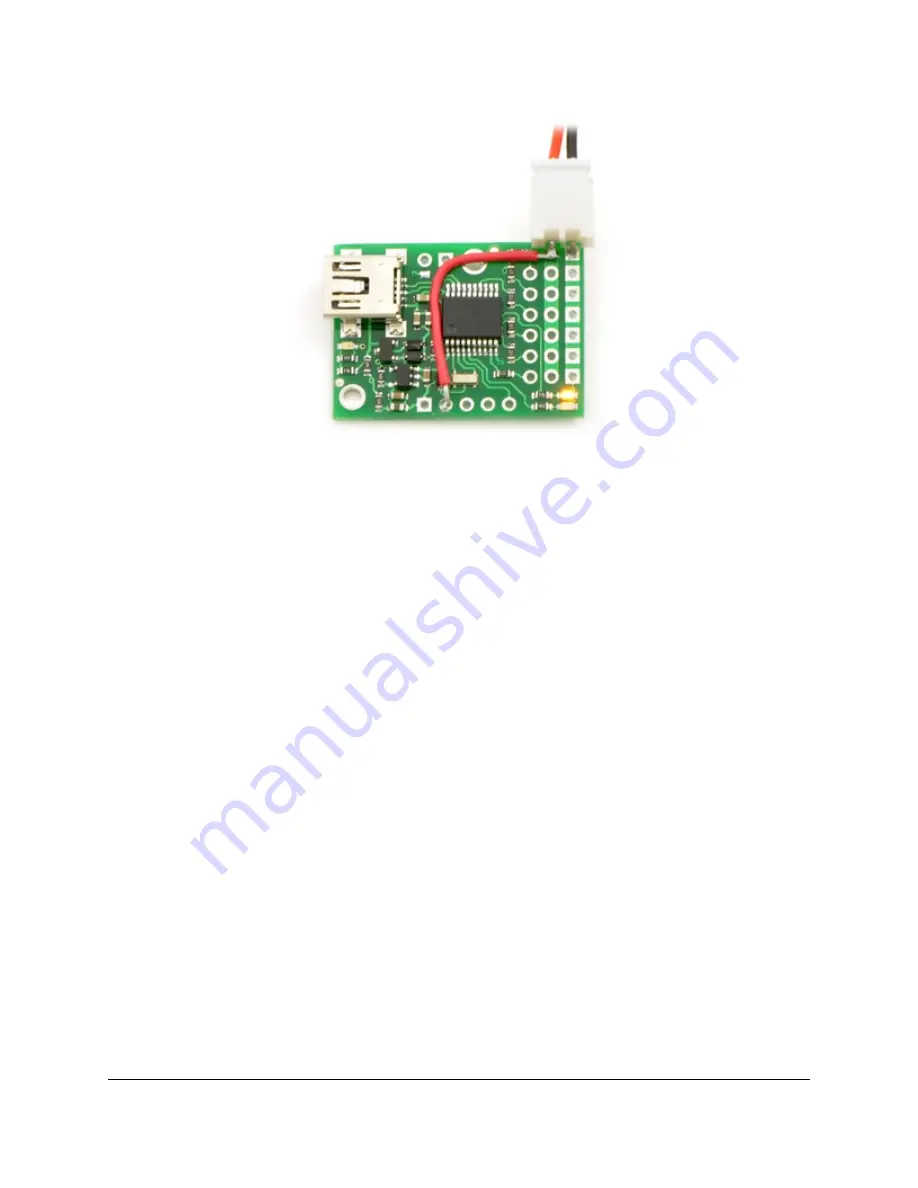
Self power and a battery connector on the Micro
Maestro.
Step 3: Verify that the Maestro and servos are functioning.
The Maestro Control Center is used for configuration and control of the Micro Maestro,
for testing, debugging, scripting, and more. See
of the
[http://www.pololu.com/docs/0J40]
for complete instructions on using the Maestro
Control Center.
Launch the Maestro Control Center and configure your Maestro for “USB Dual Port” mode.
The yellow LED should now be mostly off, flashing very briefly about once per second. On
the Status tab, enable servo ports 0, 1, and 2, and the yellow LED will start double-blinking,
indicating that some ports are active.
Next, using a piece of male header (included with the Maestro), temporarily connect a servo
to port 0. Make sure to connect the wires correctly, with the brown or black wire connected
to ground. You should hear a short high-pitched whine as the servo activates, moving to and
holding a position in the middle of its range. After a fraction of a second, when the servo
has reached its position, it should be silent. Move the slider from 1000 μs to 2000 μs to test
the motion of the servo. Test all three ports and all three servos before continuing with the
assembly.
Configure each of the servo ports to “Go to” 1500 μs on startup. This will make it easier to
align the legs later on.
Configure ports 3, 4, and 5 to be inputs. This is important, since you will be connecting
sensors later and want to avoid shorting them out!
Disconnect the battery before continuing.
Sample Project: Simple Hexapod Walker
© 2001–2010 Pololu Corporation
3. Construction
Page 6 of 21







































































