





























RX72M Group
Single-Chip Motor Control via EtherCAT Communications
R01AN5434EJ0110 Rev.1.10
Page 16 of 85
Aug.31.2020
2.4 Software Specifications
The basic software specifications of the sample program are listed below.
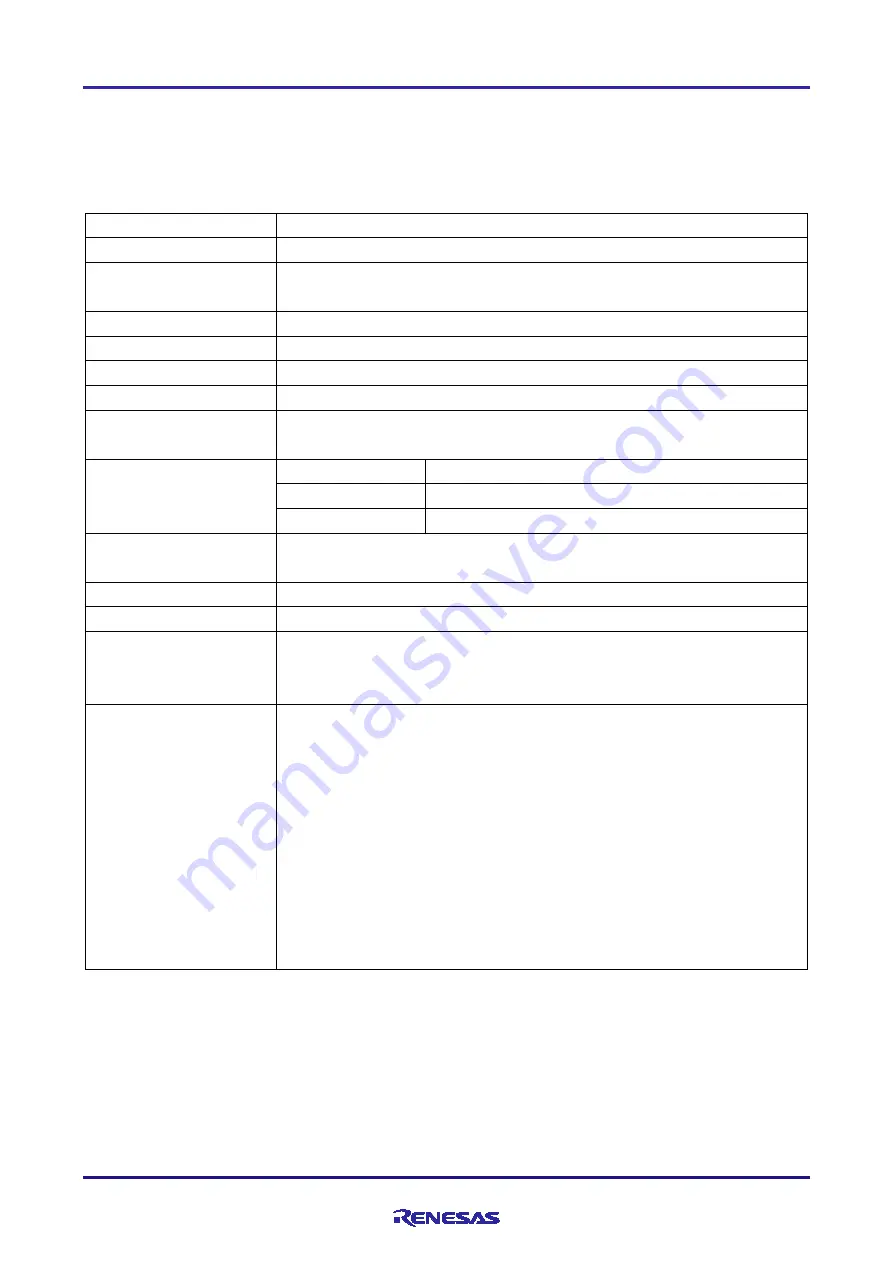
Table 2-10 Basic Specifications of the Motor Control Program
Item
Description
Control method
Vector control
Detection of rotor's
magnetic pole position
Incremental encoder (A
phase, B
phase), hall sensor (UVW phase)
Input voltage
DC 24 V
Carrier frequency (PWM) 20 [kHz] (carrier period:
50 [μs])
Dead time
2 [µs]
Control period (current)
50 [μs]
Control period (velocity,
position)
500 [µs]
Range of position
command values
Board UI
-180° to 180°
ICS UI
-32768° to 32767°
ETH UI
-2 147 483 648 [count] to 2 147 483 647 [count] *
2
Range of velocity
command values
CW: 0 [rpm] to 2000 [rpm]
CCW: 0 [rpm] to 2000 [rpm]
Positional resolution
0.3° (encoder pulse: 1000 [ppr], after multiplication by 4: 4000 [cpr])
Positional dead zone *
1
Encoder incrementing or decrementing by one t (±0.09°)
Frequencies specific to
the control systems
Current control system: 300 Hz
Velocity control system: 30 Hz
Position control system: 10 Hz
Protection stop
processing
The motor control signal outputs (6 lines) are set to the inactive level in
response to any of the following four conditions.
The current in any phase exceeds 3.82 A (monitored once every 50 µs).
The inverter’s main line voltage exceeds 28 V (monitored once every 50 µs).
The inverter’s main line voltage falls below 14 V (monitored once every 50
µs).
The rotational speed exceeds 3000 rpm (monitored once every 50 µs).
The PWM output pins are placed in the high-impedance state, when external
input of an overcurrent signal is detected (indicated by a falling edge on the
POE0# pin) or when an output short circuit is detected.
Note 1. The dead zone is provided to prevent hunting when deciding the position.
Note 2. [unit] here indicates the numbers counted from the encoder.







































































