



















RX72M Group
Single-Chip Motor Control via EtherCAT Communications
R01AN5434EJ0110 Rev.1.10
Page 5 of 85
Aug.31.2020
1.3 Projects
The sample program realizes single-chip motor control via EtherCAT communications. It was prepared by
modifying other projects for motor control and EtherCAT communications.
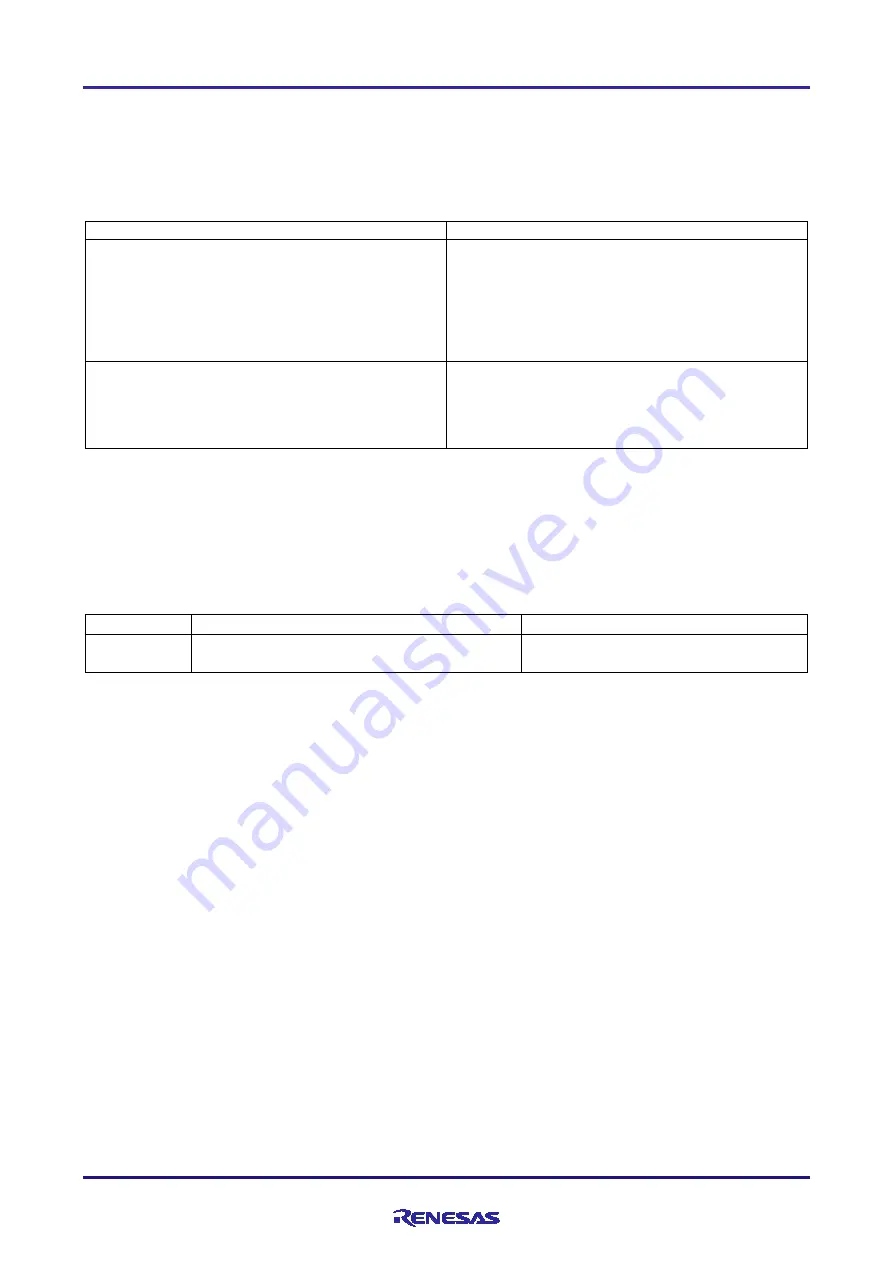
Table 1-2 Base Projects and Changes that were Required
Function/Project Name (Application note)
Changes
Motor control
RX72M_MRSSK_SPM_ENCD_FOC_E2S_RV100
(r01an5386ej0100-rx72m-motor)
API functions were added for control of the
motor by the EtherCAT communications
program.
The units of position and velocity were
converted to conform with the CiA402 object
specifications.
EtherCAT
communications
rx72m_com_cia402
(r01an4672ej0100-rx72m-ecat)
Objects were added to fit the CiA402 drive
profile.
Calls of API functions to control the motor
The project included for the sample program is shown below.
In the following sections, the RX72M CPU card plus 24-V system inverter board project is used as an
example. When using a different project, read the project name in this application note as that of the given
project.
Table 1-3 List of Projects
MCU
Evaluation Board
Project Name
RX72M
RX72M CPU card + 24-V system inverter
board
ecat_cia402_motor_rsskrx72m







































































