







SMARS - the Screwless Modular Assembleable Robotic System.
To download the files visit https://www.thingiverse.com/thing:2755973
4
9
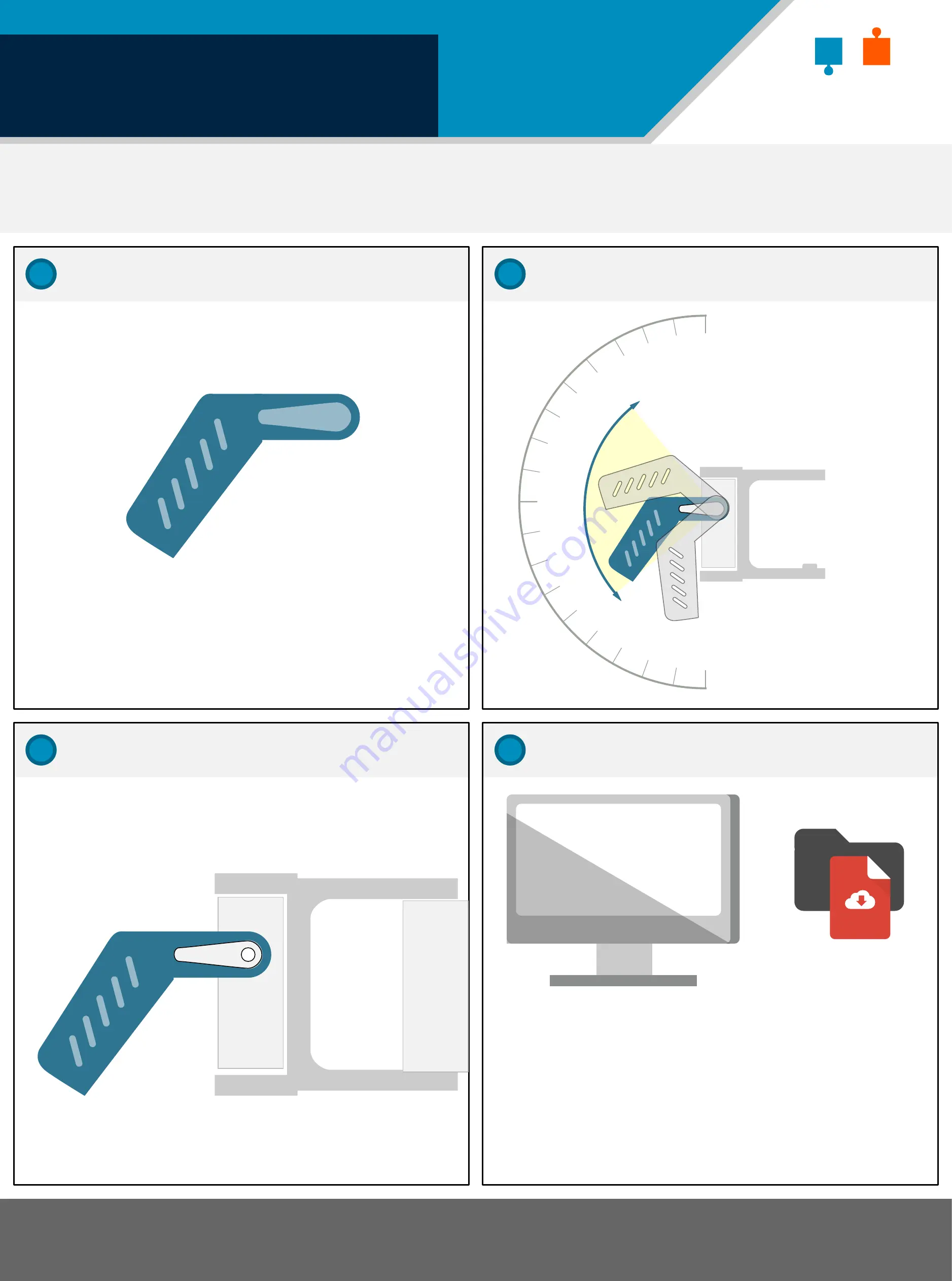
Print the feet x4
10
Mount the foot on the servo holder
11
Check the servo rotation
12
Download the python code
x4
x4
0
10
20
30
40
50
60
70
80
90
180
170
160
150
140
130
120
110
100
Feet need a rotation
of between 50
º
to 150
º
degrees
From the raspberry pi command line type:
git clone https://www.github.com/kevinmcaleer/smars
Then look in the folder at the python files.
cd smars
ls smars
QUAD ROBOT
FITTING THE FEET
S
M
A S
R







































































