















32
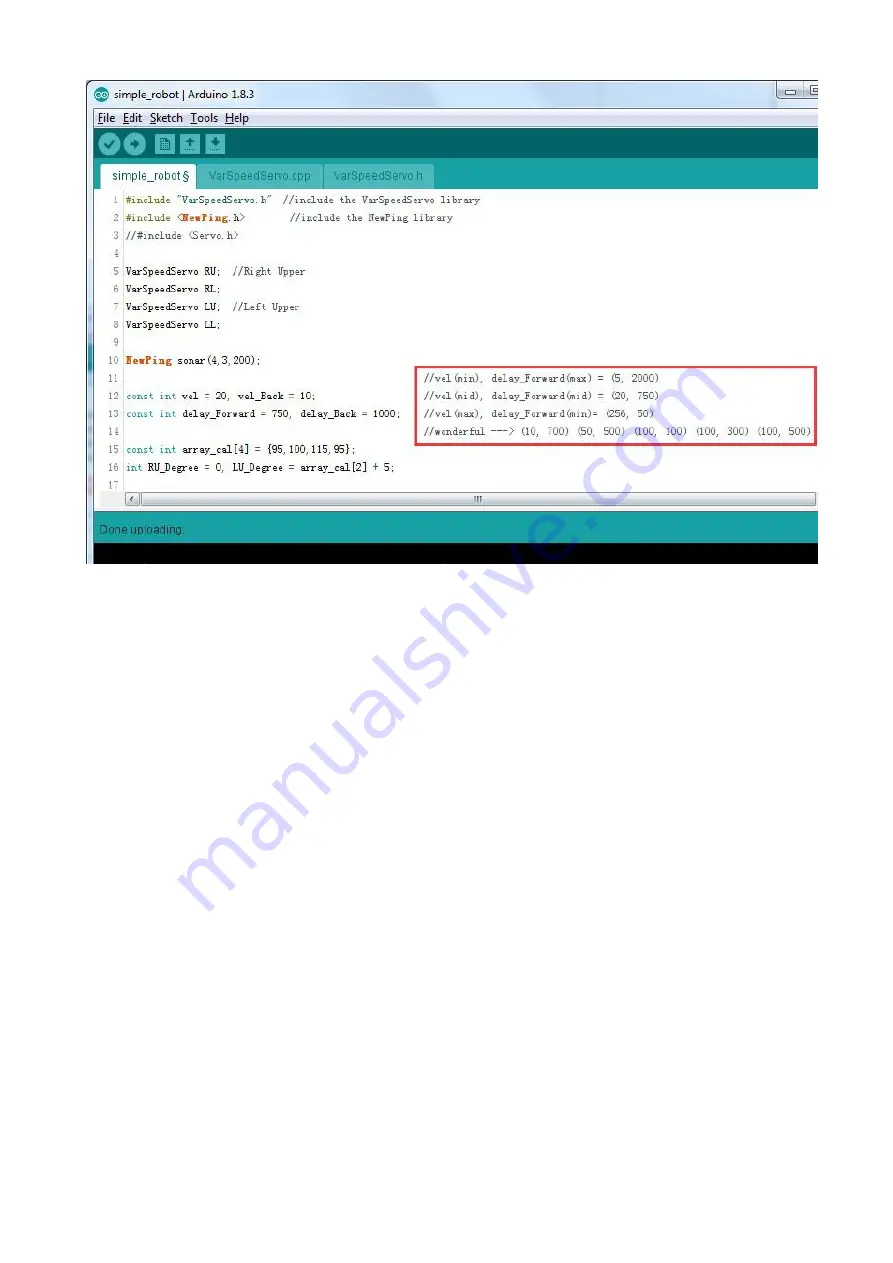
change the value of vel and delay_Forward in line12 and 13 to as shown:
vel = 50, delay_Forward = 500
Then click
Upload
.
Note: If you adjust the robot to a high walking speed, it may fall down and break. Thus it’s
better to do some protection for the Sloth.
Q4: Sloth walks too slowly when it moves backward. How to solve this?
A4
: Considering the structure of Sloth, it’s better do adjust a slow speed for backward
walking. If you want to adjust the walking speed, refer to Q3 to adjust the value. DO NOT
adjust a high speed for walking backward to avoid possible falling down.
Q5: How to make the sloth more stable in walking?
A5
: Cut to get two paper cushion for the robot feet, and stick them on the Sloth soles to
maintain enough friction for a stable walking.
Summary
In this manual, having learned the related components for building the robot kit, you’ve
gone through the assembly of the mechanical parts and electrical modules with the
knowledge of Arduino as well as a brief introduction of the key parts like servo, ultrasonic,
etc. Also you’ve got a lot of software and coding, which lays a solid foundation for your
futrue journey of exloring open-source field.


































































