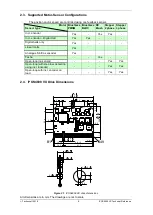
Technosoft iPOS4808 VX, Technical Reference
The Technosoft iPOS4808 VX user manual is a comprehensive Technical Reference that provides in-depth information about the product. Available for free download from our website, this manual is a valuable resource for understanding and maximizing the functionalities of iPOS4808 VX.
Share
Download















Reviews:
No comments
Related manuals for iPOS4808 VX

ACSM1 Series
Brand: ABB Pages: 334

M Series
Brand: YASKAWA Pages: 81

E Series
Brand: YASKAWA Pages: 206

DDS
Brand: Fagor Pages: 56

MINAS A5 Series
Brand: Panasonic Pages: 19

MINAS A6 Series
Brand: Panasonic Pages: 18

MINAS A6 Series
Brand: Panasonic Pages: 306

VLT Integrated Servo Drive ISD 510 System
Brand: Danfoss Pages: 226

Ezi-SERVO ST
Brand: Fastech Pages: 40

NI 9502
Brand: National Instruments Pages: 29

631 Series
Brand: Parker Pages: 59

UM Series
Brand: Baldor Pages: 40

DS3 series servo
Brand: Xinje Pages: 120

C1400-CO-VS-0S-I03
Brand: NTI AG Pages: 20

Servos Series
Brand: Onyx Pages: 2

MAX-430
Brand: Electro-Craft Pages: 60

EtherCAT CoolDrive RC Series
Brand: Tsino Dynatron Pages: 278

ILM Series
Brand: TQ Pages: 28





















































