





























Activ
Media Robotics
When used by client software, AROS' Gripper servers monitor and report the accessory’s
progress towards and achievement (or lack) of a state, saving you coding time and
effort. And the servers include a timeout feature to protect against unfortunate stalls or
hang-ups.
GRIPPERVAL Gripper Values
In some cases, the Gripper command requires an operating value. Use another AROS
command to set that operating value: Immediately follow the AROS
GRIPPER
command
(33) that contains the Gripper-server command with the AROS
GRIPPERVAL
command
(36) and make its integer argument the preceding Gripper command's operating value.
Grasping Pressure
To set how hard the Gripper paddles will grasp an object, set a
grasp_time
delay, in 20
millisecond increments, for when the paddle contacts trigger (about 0.2kg pressure) to
when the Gripper motor stops. The default is ten (200 milliseconds) which provides a
grasping pressure of around 0.5kg. Incrementally, the grasping pressure is roughly 0.5kgs
per 200 milliseconds, to a maximum grasping pressure of around 2kg (
grasp_time
of 2
seconds).
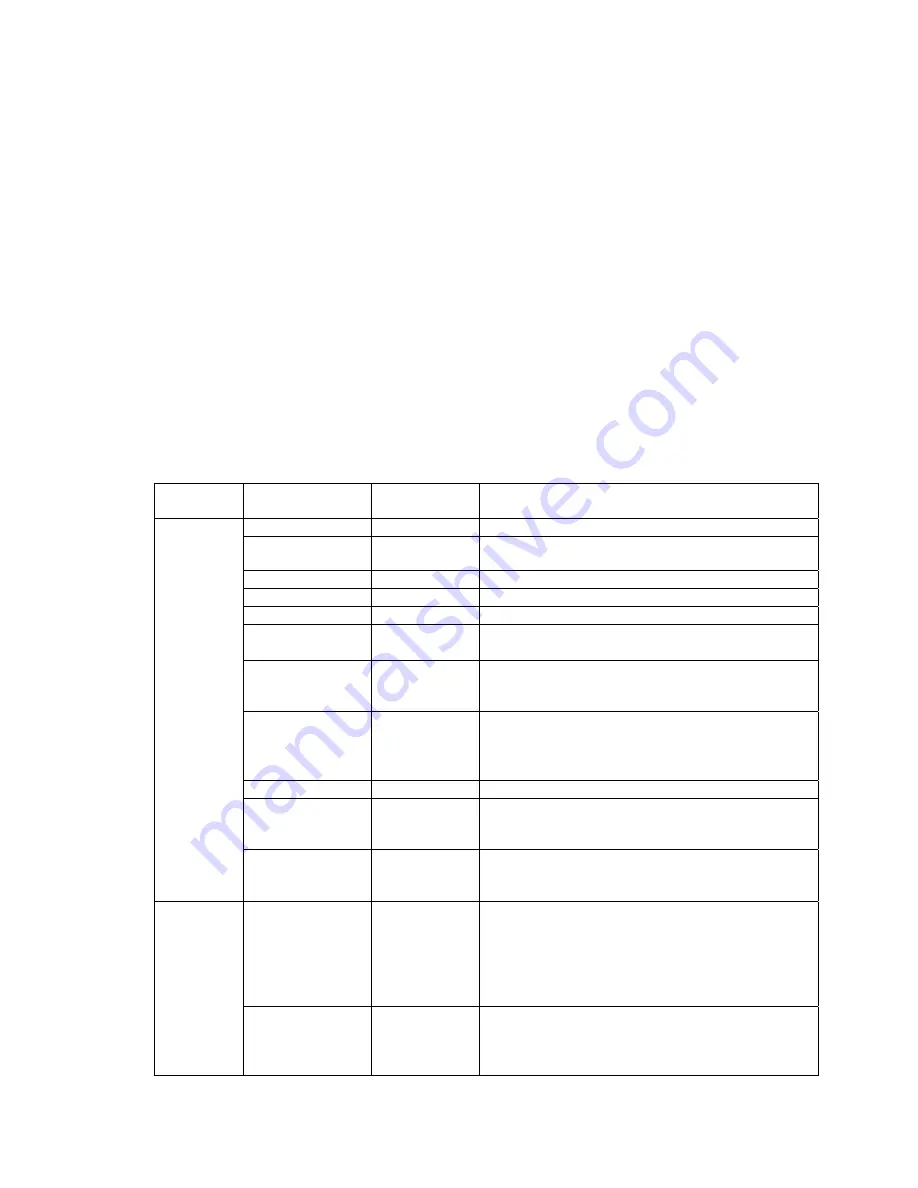
Table 11. AROS Gripper-server commands
AROS
COMMAND
ARGUMENT
LABEL
ACTION
1
GRIPopen
Open Gripper paddles
2
GRIPclose
Close Gripper paddles; grasp
pressure regulated by command #16
3
GRIPstop
Stop Gripper paddles
4
LIFTup
Raise
Lift
5
LIFTdown
Lower
Lift
33
6 LIFTstop
Stop
Lift
7
GRIPstore
Simultaneously closes paddles and
raises Lift. For storage; not for
grasping/carrying an object
8
GRIPdeploy Simultaneously lowers Lift and
opens paddles. Not useful for
object drops, but for getting ready
to grasp an object.
15
GRIPhalt
Halts both Gripper paddles and Lift
16
GRIPpress
Sets gripper grasping pressure;
must
follow immediately with P2OS
command 36 and grasp time value.
17
LIFTcarry
Intermediate Lift position;
must
follow immediately with P2OS
command 36 and carry_time value
36
1-100
grasp_time Time delay in 20 millisecond
increments after Gripper paddles
first grasp an object and before
they stop moving. Regulates grasp
pressure.
± 1-255
carry_time Time in 20 millisecond increments
to raise (+) or lower (-) the
Gripper lift; allows for a “carry”
position
49







































































