

























ETAS
Hardware Description
ETK-S20.1
-
User Guide
22
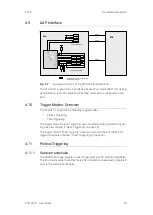
4.8
Data Emulation and Data Measurement
In the case of a serial ETK the measurement RAM is part of the ECU and is not
accessible until the ECU is powered up and the basic initialization has been
performed. The goal must be to perform the download into the ECU after the
ETK's startup message was sent.
All serial ETKs have a system of Reference and Working Page (ETAS two pages
ETK concept). The Reference Page is located in the ECU flash and can not be
modified by a simple write access. As with all serial ETK’s this change must be
done via Flash programming.
The Working Page is implemented with internal RAM overlaying the flash by
using microcontroller internal mechanisms. The overlay RAM used for the
emulation of calibration data must not be used by the ECU software directly.
The ETK/INCA has the complete control over this RAM and it's contents. When
enabling a data emulation or after power loss INCA establishes a basic start-up
configuration of the data in the RAM by copying the corresponding data in the
Flash to the emulation space.
In contrast to a parallel ETK no flash memory for permanent storage of the
adjusted parameters (program data) is available on the ETK.
The switching between Reference and Working Page is performed by switching
the data emulation on and off. It is done by modifying overlay registers of the
microcontroller, which are dedicated only to the ETK. The microcontroller must
change the values of these registers after the startup handshake with the ETK
has been performe and after the INCA request.
The page switching is performed via a communication method with the ECU
software. A small software protocol between the ECU and the host is needed to
get the current page status and perform the switching. The access to the micro
controller registers and the real page switching is completely under the control
of the ECU software.
Another important restriction is that no access to memory is possible, while the
ECU is not running. To enable a cold start measurement in spite of this restric
-
tion, a special procedure was defined to give the user the feeling of a parallel
ETK.
NOTE
If the BMI header is not valid or program flash which contains the BMI header
is erased completly it is not possible to access the microcontroller neither via
ETK nor via debugger. In this case a BootModeHeader must be programmed
over ASC or CAN interface. For detailed information see the Infineon TC27x
Target Specification.







































































