




























S94P01C -e1
39
STOP!
If the EPM contains any data from an inverter drive, that data will be
overwritten during this procedure.
6.1.3 EPM Fault
If the EPM fails during operation or the EPM is removed from the EPM Port, the drive
will generate a fault and will be disabled (if enabled). The fault is logged to the drives
fault history. Further operation is not possible until the EPM is replaced (inserted) and
the drive’s power is cycled. The fault log on the display shows “
F_EP
” fault.
6.2 Motor Group
The motor group shows the data for the currently selected motor. Refer to Section 5.5
for details on how to select another motor from the motor database or to configure a
custom motor.
6.3 Parameters Group
6.3.1 Drive Operating Modes
The PositionServo has 3 operating mode selections: Torque, Velocity, and Position.
For Torque and Velocity modes
the drive will accept an analog input voltage on
the AIN1+ and AIN1- pins of P3 (see section 5.3.1). This voltage is used to provide a
torque or speed reference.
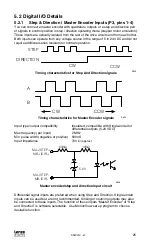
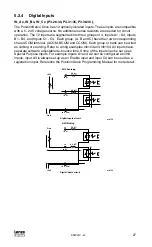
For Position mode
the drive will accept step and direction logic signals or a
quadrature pulse train on pins P3.1- P3.4.
6.3.1.1 Torque Mode
In torque mode, the servo control provides a current output proportional to the
analog input signal at input AIN1, if parameter “Reference” is set to “External”.
Otherwise the reference is taken from the drive’s internal variable. (Refer to the
PositionServo Programming Manual for details).
For analog reference “Set Current”, (current the drive will try to provide), is
calculated using the following formula:
Set Current(A) = Vinput(Volt) X Iscale (A/Volt)
where:
• Vinput is the voltage at analog input
• Iscale is the current scale factor (input sensitivity) set by the Analog input
(Current Scale) parameter (section 6.5.5).
6.3.1.2 Velocity Mode
In velocity mode, the servo controller regulates motor shaft speed (velocity)
proportional to the analog input voltage at input AIN1, if parameter “Reference”
is set to “External”. Otherwise the reference is taken from the drive’s internal
variable. (Refer to the PositionServo Programming Manual for details).
For analog reference, Target speed (set speed) is calculated using the following
formula:
Set Velocity (RPM) = Vinput (Volt) x Vscale (RPM/Volt)
where:
• Vinput is the voltage at analog input (AIN1+ and AIN1-)
• Vscale is the velocity scale factor (input sensitivity) set by the Analog input
(Velocity scale) parameter (section 6.3.6).







































































