





























3DM
®
-GX5-35
DCP Manual
5.1.11
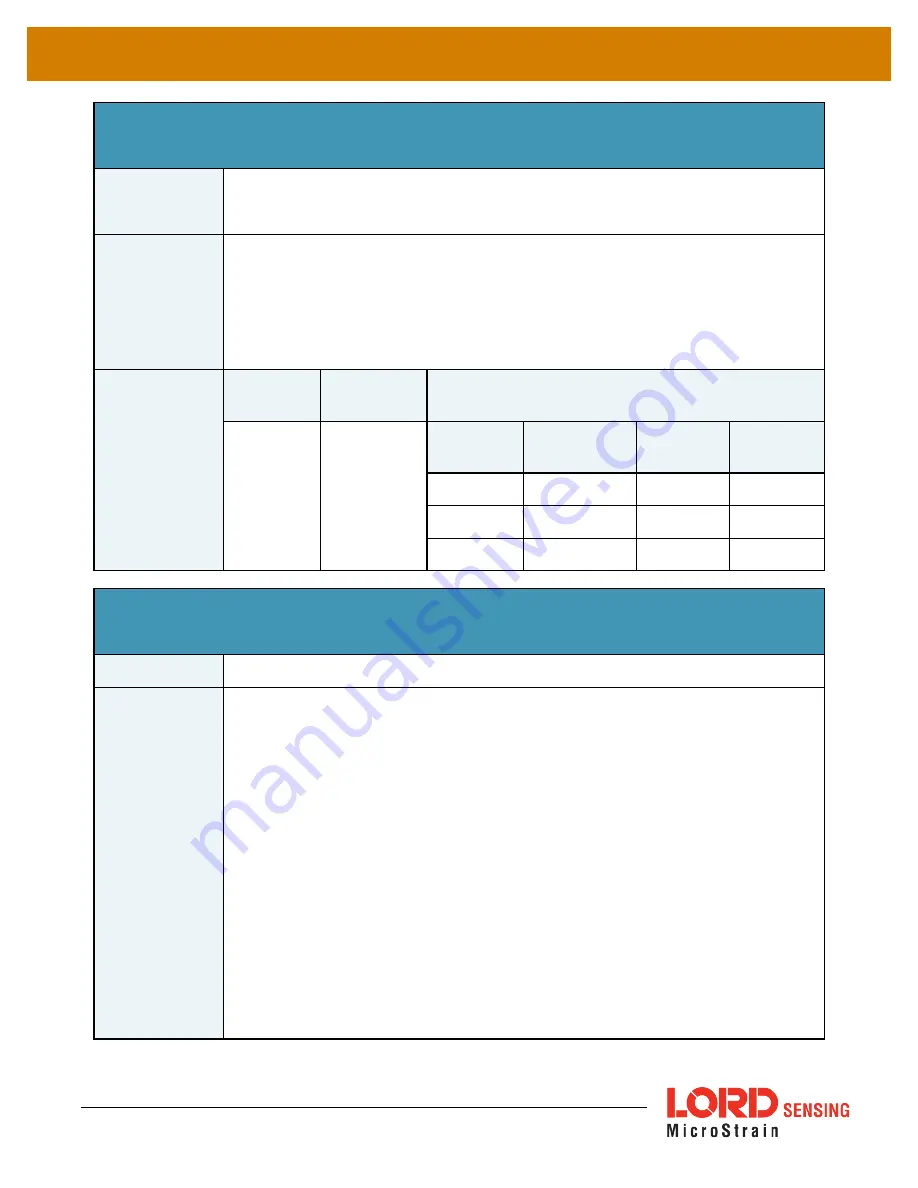
CF Stabilized Up Vector (0x80, 0x11)
Description
Gyro stabilized estimated vector for the gravity vector.
This value is produced by the Complementary Filter fusion algorithm.
Notes
This is a vector which represents the IMU/AHRS complementary filter’s best estim-
ate of the vertical direction. Under stationary conditions, it should be equal to Accel.
In dynamic conditions, Accel will be sensitive to both gravitational acceleration as
well as linear acceleration. The Complementary filter computes Stab Accel which is
its estimate of the gravitation acceleration only, even thought the system may be
exposed to significant linear acceleration.
Field Format
Field Length
Data
Descriptor
Message Data
14 (0x0E)
0x11
Binary
Offset
Description
Data Type
Units
0
X Stab Accel
Float
G
4
Y Stab Accel
Float
G
8
Z Stab Accel
Float
G
5.1.12
GPS Correlation Timestamp (0x80, 0x12)
Description
GPS correlation timestamp.
Notes
This timestamp has three fields:
Double GPS TOW
U16 GPS Week number
U16 Timestamp flags
Timestamp Status Flags:
Bit0 – PPS Beacon Good If set, GNSS PPS signal is present
Bit1 – GPS Time Refresh (toggles with each refresh)
Bit2 – GPS Time Initialized (set with the first GPS Time Refresh) (
GPS Time Update (0x01, 0x72) on page 32
This timestamp correlates the IMU packets with the GPS packets. It is identical to
the GPS Time record except the flags are defined specifically for the IMU. When the
GPS Time Initialized flag is asserted, the GPS Time and IMU GPS Timestamp are
78







































































