




























5- 32
M68000 8-/16-/32-BIT MICROPROCESSORS USER'S MANUAL
MOTOROLA
4. For an MC68010, return
DTACK
before data verification. If data is invalid, assert
BERR
on the next clock cycle (case 4).
Table 5-6.
BERR
and
HALT
Negation Results
Conditions of
Termination in
Negated on Rising
Edge of State
Table 4-4
Control Signal
N
N+2
Results—Next Cycle
Bus Error
BERR
HALT
•
•
or
or
•
•
Takes bus error trap.
Rerun
BERR
HALT
•
•
or
•
Illegal sequence; usually traps to vector number 0.
Rerun
BERR
HALT
•
•
Reruns the bus cycle.
Normal
BERR
HALT
•
•
or
•
May lengthen next cycle.
Normal
BERR
HALT
•
or
•
none
If next cycle is started, it will be terminated as a bus
error.
• = Signal is negated in this bus state.
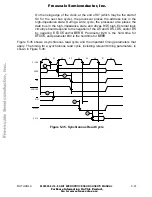
5.7 ASYNCHRONOUS OPERATION
To achieve clock frequency independence at a system level, the bus can be operated in
an asynchronous manner. Asynchronous bus operation uses the bus handshake signals
to control the transfer of data. The handshake signals are
AS
,
UDS
,
LDS
,
DS
(MC68008
only),
DTACK
,
BERR
,
HALT
,
AVEC
(MC68EC000 only), and
V P A
(only for M6800
peripheral cycles).
AS
indicates the start of the bus cycle, and
UDS
,
LDS
, and
DS
signal
valid data for a write cycle. After placing the requested data on the data bus (read cycle)
or latching the data (write cycle), the slave device (memory or peripheral) asserts
DTACK
to terminate the bus cycle. If no device responds or if the access is invalid, external control
logic asserts
BERR
, or
BERR
and
HALT
, to abort or retry the cycle. Figure 5-31 shows the
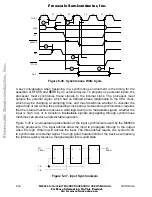
use of the bus handshake signals in a fully asynchronous read cycle. Figure 5-32 shows a
fully asynchronous write cycle.
AS
R/W
DTACK
UDS/LDS
DATA
ADDR
Figure 5-31. Fully Asynchronous Read Cycle
F
re
e
sc
a
le
S
e
m
ic
o
n
d
u
c
to
r,
I
Freescale Semiconductor, Inc.
For More Information On This Product,
Go to: www.freescale.com
n
c
.
..







































































