
















5 Operation of the application
5.2 Scenario B
Speed Control with SINAMICS V90 and S7-1200 via PROFINET
Entry-ID: 109739222, V1.0, 07/2016
21
S
iem
e
n
s A
G
2
0
1
6
A
ll r
igh
ts
re
se
rv
e
d
Table 5-2-2
Output interface of FB285
Output
signal
Type
Default
Meaning
Error
BOOL
0
1 = general fault active
ErrorId
INT
0
Mode fault / block fault:
0=no fault active
1=drive fault active
2=drive switching on inhibited active
3=error of the SFB call active
PwrInhibit
BOOL
0
Switching on inhibited active
PwrInhibit=1
Busy
BOOL
0
Mode is being executed orenabled
VeloAct
REAL
0.0 [rpm]
Current velocity
dependent on scaling
factor FactRPM
DiagId
WORD
0
Extended communication error
error
during SFB call
In scenario B, we will use FB285 in the library for programming and run the motor.
Table 5-2-3
Operation with FB285
No.
Action
Remarks
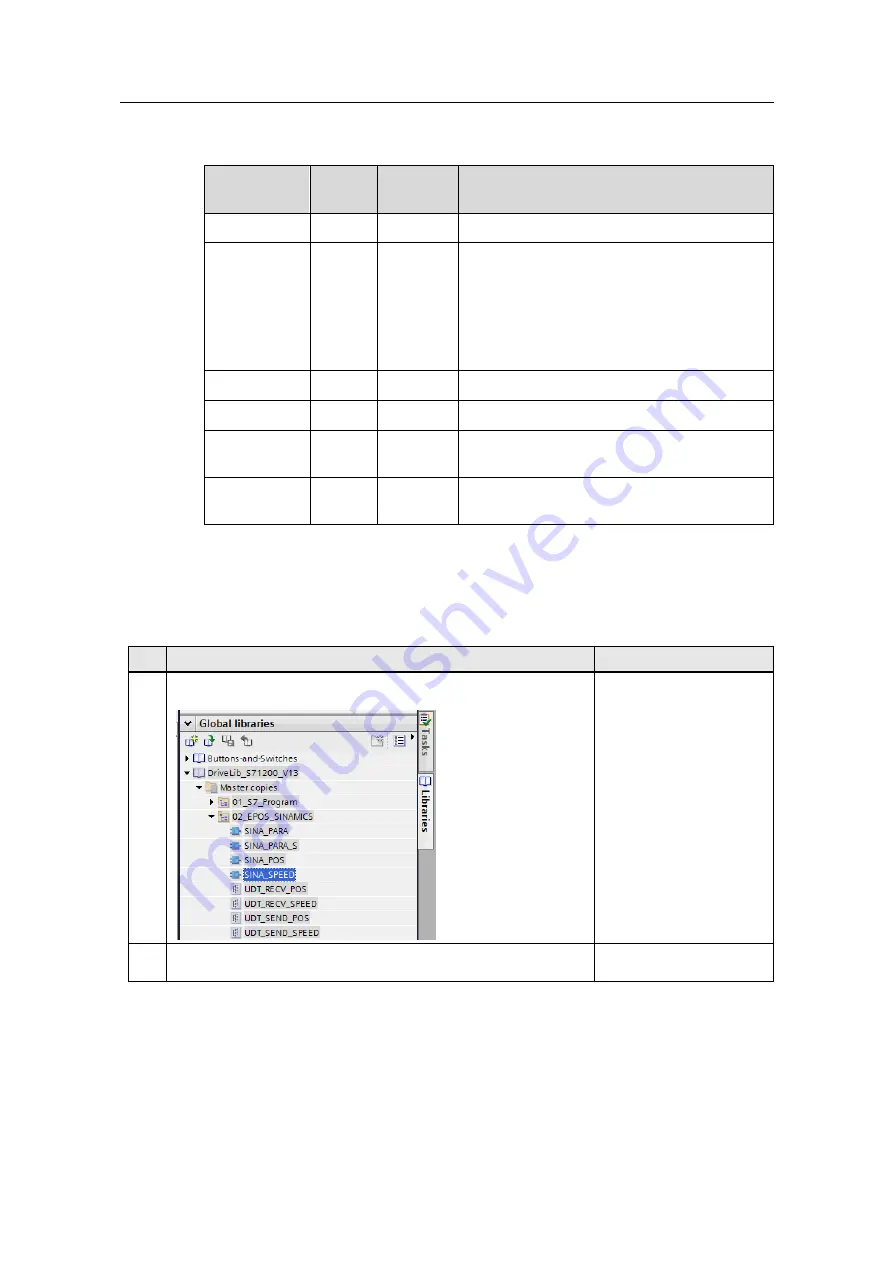
1. When you have installed the library, you can find it at the library view
as follows:
2. Insert or drag FB285 <SINA_SPEED> into the PLC main block and
make program as follows:







































































