



























<9. Advanced Engineering >
205
TI 34P02K35-02E May 31, 2017-00
● Example of Correct Status Propagation
In the example given in Section 9.2.3, "NPAS_POU Status Propagation," two
NPAS_PIDs are connected in cascade.
If the application is correctly programmed, the control modes and operations of the
two NPAS_PIDs will be interlocked as shown below.
No.
Mode
Operation
1
NPAS_PID_1
AUT
Outputs result of PID calculation to SV value of PID_2.
NPAS_PID_2
CAS
Performs PID calculation using MV value of PID_1 as SV value.
↓
2
NPAS_PID_1 AUT IMAN Stops PID calculation as cascade connection is open.
The MV value tracks the SV value of PID_2.
NPAS_PID_2
AUT
Continues PID calculation. The SV value can be changed freely.
↓
3
NPAS_PID_1
AUT
Restarts PID calculation , and outputs SV value to PID_2.
NPAS_PID_2
CAS
Performs PID calculation using MV value of PID_1 as SV value.
When transiting from state 1 to state 2, the upstream NPAS_PID_1 switches to AUT
IMAN mode, and stops PID calculation.
Moreover, its MV value tracks the SV value of NPAS_PID_2.
When transiting from state 2 to state 3, NPAS_PID_1 restarts PID calculation, and
NPAS_PID_2 uses the MV value of PID_1 as its SV value.
This series of operation is closely related to the propagation of upstream status
information downstream and the read back of downstream status information
upstream.
When transiting to state 2, NPAS_PID_2 stores information about an open cascade
connection condition in RB_PID2, which is connected to its RB_OUT terminal.
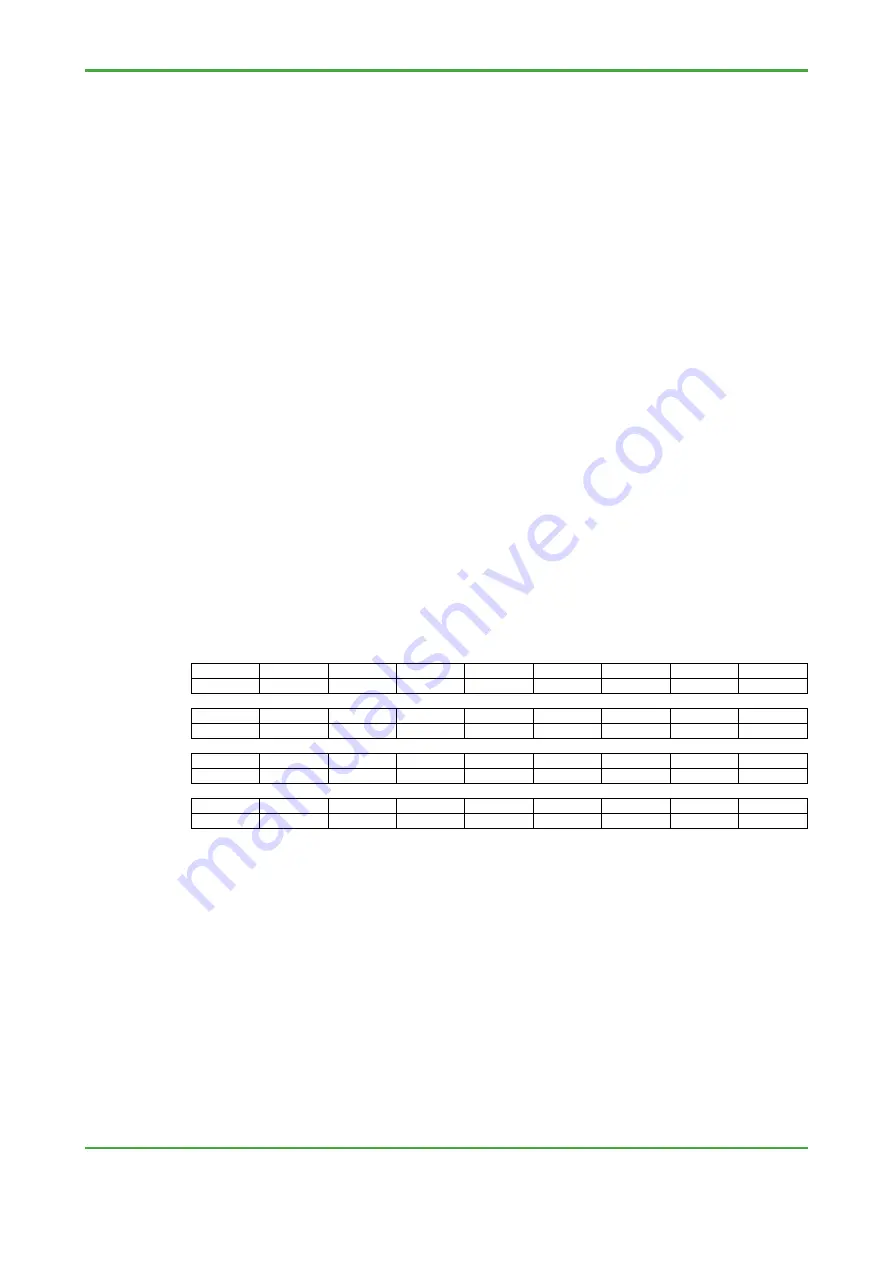
Specifically, bit 24, which represents “CND: CoNDitional” in the status bitmap shown
below, is set to 1.
Bit No.
31
30
29
28
27
26
25
24
Status
Reserved
QST
Reserved Reserved
PTPF
CLPP
CLPM
CND
Bit No.
23
22
21
20
19
18
17
16
Status
CAL
Reserved
OS
Reserved
MINT
SINT
NSEL
PRST
Bit No.
15
14
13
12
11
10
9
8
Status
BAD
IOMT
IOPP
IOPM
OOP
NRDY
PFAL
LPFL
Bit No.
7
6
5
4
3
2
1
0
Status
SIM
IOCN
CERR
Not used Not used Not used Not used Not used
As RB_PID2 is connected to the RB_IN terminal of NPAS_PID_1, downstream CND
(CoNDitional) information is propagated upstream to NPAS_PID_1, which then
switches to AUT IMAN mode.
Moreover, as RB_PID2 also contains the SV value of NPAS_PID_2, its own MV
value tracks this value.
Next, when transiting to state 3, the CND bit of RB_PID2 is reset to 0, and bit 19
(MINT: Master INiTialize request) is set to 1.
NPAS_PID_1 accepts the MINT (Master INiTialize request) from NPAS_PID_2, and
begins preparation to restart PID calculation.
After preparation is completed, bit 18 (SINT: Settled INiTialize) of Status of the OUT
terminal is set to 1.
Summary of Contents for STARDOM FCN-500
Page 2: ...Blank Page...
Page 10: ...Blank Page...
Page 32: ...Blank Page...
Page 36: ...TI 34P02K35 02E Jun 6 2018 00 Blank Page...
Page 76: ...TI 34P02K35 02E Jun 6 2018 00 Blank Page...
Page 163: ...Blank Page...
Page 221: ...Blank Page...
Page 225: ...Blank Page...







































































