


















Website:-www.bholanath.in
E-mail id:-support@bholanath.in
BHOLANATH PRECISION ENGINEERING PVT. LTD.
Page | 35
Example:
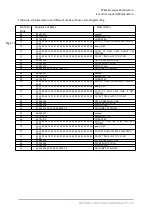
Command for Cycle 1 for Move:
01,10,00,2A,00,08,10,02,30,02,02,00,00,00,64,00,00,01,90,11,13,00,00
01 -> Slave Address
10* -> Function Code
00* -> LSB Address of Holding Register for Cycle 1
2A* -> MSB Address of Holding Register for Cycle 1
00, 08* -> Quantity of registers to be write in holding register
10* -> Total Byte count to be write in AUTO command
02 -> Next Cycle No.
30 -> Move the motor with provided steps in clockwise direction
02 -> Acceleration
02 -> Deceleration
00 -> Speed in RPM
00, 00, 64 -> 100 Rpm in hexadecimal
00,00,01,90 -> 400 steps in hexadecimal value
11 -> Start the cycle at switch 1 high
13 - > Stop the cycle at switch 2 high.
00 -> No output
00-> No output
(* indicates these values are fixed
)
Response: 01,10,00,2A,00,08
(********-----------------------------------
Instructions-----------------------------------
------
********
The Holding Register address of next cycle number use following formula
Holding Register address = Holding Address of Cycle 1 + (Next Cycle No - 1)*8
Example:
Next Cycle No is 2
So,
Holding Register address for Cycle 2 = 2A + (2-1)*8
= 2A +8
= 32
Holding Register address for Cycle 47 = 2A + (47-1)*8
= 2A + 170
=
19A
********
-----------------------------------------------------------------------------------------------
********)
Command for Cycle 2 for Delay:
Delay is provided in millisecond
01,10, 00,32,00,08,10,03,01,00,00,00,00,07,D0,00,00,00,00,00,00,00,00







































































